| ����늙C�D�����Ե��о�
ժҪ������늙C�����É���մɵ��扺�Ч���������ֱ���D׃�əCе����ܵķN���b�á����нY�����Ρ���ֱ���ӡ�푑��ٶ�r�A�����ƾ��ȸߵ����c�����Ľ�B�˳���늙C�ӿ���ԭ���Լ����D�ӵ�һ�N���|ģ�ͣ�Ȼ��ᘌ��@�N���|ģ�͏���Փ���о����D�����ԣ������^�˃ɷN�����������˼��ĺ��D�ؿ��Ƶ�Ч����
�P�I�~������늙C�����|ģ�ͣ��D�ؿ��ƣ���һ�����
O����
����늙Cfultrasonic M0tor�����QuSMl��ͬ��һ���늴�늙C�������É���մ�(PleZO��electric ceramic)���е��扺�Ч�������ڽ�׃늈������£�����մɕ��a����s�F��ͨ�^���N��s���ģʽ���D�Q�c��ϣ������ֱ���D׃�əCе����ܣ�������Ħ���D׃�����D(�������\�ӷ�ʽ)�Cе�ܵ����b��
Ŀǰ��õij���늙C��h���в��ͳ���늙C(Ring��tvpe Traveling��wave ultrasonicMotom���QR��wusM)����Y�����c�Ƕ��Ӻ��D�Ӿ���һ���A�h��ʹ������늙C�Y���ʱ�A�h�Ρ�����IJ������ɉ���մɺ͏����w�M�ɵĶ��Ӽ����|��ճ��Ħ�����ϵ��D�ӡ����D����������׃�����a�����S�����o����һ��
�c���y늴�늙C��ȣ�����늙C���S�ચ�صă��c�����ٴ��D�ء�늴ż����Ժá������졢������i���\�Пo����l����J����������M���a����늡�܊������܇�������i�C���˵��I�������V���đ���ǰ����������߳���늙C�đ���ˮƽ����չ����늙C�đ����I��H������Ҫ�ӿ쌦����늙C˲�B���Եķ������о�������˲�B������Ҫ���о����D��׃�������c��ʹ�ܿ��������Ӻ�ֹͣ��푑��r�g��������ۙ܉�E�\�ӕr���ٶȿ��ƿ���ͨ�^�о��D�����ԁ팍�F��1����늙C�\�ӷ���
�h���в��ͳ���늙C�\�еĻ���ԭ�������Ã��ཻ׃����늉�����N�ڶ����ϵĉ���մ��Юa�������Ƅӵ��в���ͨ�^���D�ӽ��|��Ħ�������D���D�ӡ�
�����ϵĉ���մ������օ^�O�������෴����늉������£�������늷օ^ͨ�^���P�ĉ���մɵķ��㉺�ϵ�����քe�쏈���տs���Ķ����l�M���L���쏈���տs���ģ�������ڶ��ӏ����w
�м����������ӣ����ډ���w��һ������̖�����£�һ��ֻ�ܫ@���v���ֲ�����ʹ�Æ��ཻ׃늉������մɭhA�^����B�^��ֻ���ڶ��ӭh�м��l����һ���v����ӣ���ʹ�Ã��ཻ
׃늉�ͬ�r����A�^��B�^����һ���l���¯B�Ӿ�jJ���ڶ��ӭh�м��l���в���ӡ������C�����в��������¶��ӱ�����|�c���E�A�\�ӿڡ�
�D���ٶȣ����������¹�ʽ��ʾ
���о���A���B����ӵ��������=2�ڣ��֞鏗�Բ���ӵIJ�����h�鶨���ϱ��浽���Ԍӵľ��x(���N�ڶ���I�ĉ���մɺ�ȵ�һ��)���۞�A�ࡢB�����g����λ�
���в�����늙C�Y���OӋ��ɺ�^��h�_�������Էքeͨ�^�{������մɵă��༤��늉��ķ�ֵ�u��A��B����֮�g��λ����Լ����l�ʏS���{���в������c���ٶȁ������D�ӵ��D
���ٶȡ�ݔ���D�ء������Ҋ�����N���Ʒ������{�l���{����{����
2���D�ӽ��|ģ��
���ڶ�������Ӡ�B�£������|�c�\�Ӿ��ЙM��λ�ƺͿv���ٶȣ�ʹ����ͨ�^Ħ�������D���D�ӳɞ���ܡ�ͨ�^���в�����늙C���D�ӽ��|�����Եķ����������Mһ�����о����D���g���Ă��f�C����
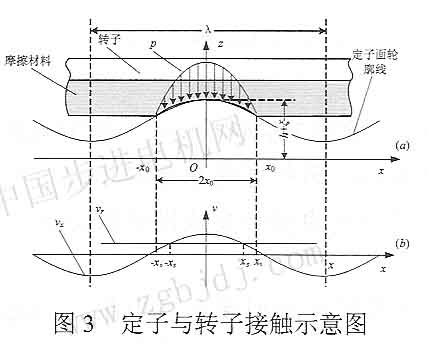
��������Ӟ������в��r����ʽw(x����)=һ��cos(ū+��f) �������ڴ���r�£������в�������c�r�g�o�P�����B���в����Π�ֲ�׃���麆����������ȡf��z�r�̶��Ӻ��D�� �����L�Ľ��|���M�з�������D3(a)��ʾ����
|



