�߿ɿ�����ͬ��늄әC������Ƽ��g(sh��)�о�
�����������|�����X��
(�Ї���ӿƼ����F��˾��һʮһ�о������Ϻ�200233)
ժҪ����������������e�ɂ������U��������ͬ��늄әC�������ϵ�y(t��ng)�Ŀɿ����O(sh��)Ӌ���g(sh��)��ӑՓ���p���늙C�����e늙C���M��ň�����늙C�ĽY(ji��)��(g��u)���c������Ʒ�ʽ���ڴ˻��A(ch��)ذ�Mһ���о�������ͬ��늄әC�Ĺ��ϱ��R���g(sh��)�����e���Ƽ��g(sh��)���о���(n��i)�ݞ���ԓ���g(sh��)���Mһ���о�����˻��A(ch��)��
�P(gu��n)�I�~����ȣ����e���M��ň������R
O����
��������S�������Ӽ��g(sh��)��늙C���Ƽ��g(sh��)��̎�������g(sh��)�İl(f��)չ������ͬ��늄әC���Ƽ��g(sh��)��������Ч�ʡ������ܼ����ܻ�����l(f��)չ����һЩ�����I(l��ng)���纽�պ��졢�����b�估늄әC܇���I(l��ng)�ɿ�����һ���Ҫָ�ˡ���ˣ����߿ɿ�������ͬ��늄әC�������ϵ�y(t��ng)���о������зdz��ش����Փ�ͬF(xi��n)�����x��
�ɿ�����ָ�a(ch��n)Ʒ��Ҏ(gu��)���l���º�Ҏ(gu��)���r�g��(n��i)�����Ҏ(gu��)�����ܵ��������ڷ������Y(ji��)����(n��i)��ɿ��Լ��g(sh��)���о��ɹ���****�Mչ��������ͬ��늄әC�������ϵ�y(t��ng)�ɿ��Լ��g(sh��)�w�{�����༼�g(sh��)�����e���g(sh��)[1]�����༼�g(sh��)��ͨ�^���Ӷ����YԴ����߿ɿ��Ե��O(sh��)Ӌ��������������о����p�������ͬ��늄әC�������ϵ�y(t��ng)���S����(sh��)����̖̎�������F(xi��n)�����Ƽ��g(sh��)�İl(f��)չ�����څ���(sh��)���R���g(sh��)������ͬ��늄әC���e���Ƽ��g(sh��)�ɞ����о��ğ��c��ϵ�y(t��ng)����(j��)����(sh��)���R�Y(ji��)�����z�yϵ�y(t��ng)�\�Р�B(t��i)������(j��)������r��׃���Ʒ�ʽ�����F(xi��n)ϵ�y(t��ng)�ؘ�(g��u)������ϵ�y(t��ng)���ܲ�׃��������Ե�����ͬ��늄әCϵ�y(t��ng)�����e늄әC������늄әC�͙M��ň�����늄әC��
���ď�����ͬ��늄әC�ĽY(ji��)��(g��u)�����Ʋ��ԡ��·�ؓ�Y(ji��)��(g��u)��늄әC���e���R�����e���Ƶȷ����^ϵ�y(t��ng)�U�������߿ɿ�������ͬ��늄әC�������ϵ�y(t��ng)�Ĺ�����ʽ���о��F(xi��n)�����ڵĆ��}�������Ƅ��҇���ԓ�I(l��ng)����о���
1�p�������ͬ��늄әC����ϵ�y(t��ng)�о�
���F(xi��n)��ȿ���һ���ЃɷN��ʽ�����ݺ͟��ݡ�������ָ��������r�£�ֻ��һ�����������������һ��Ȳ���������(d��ng)ϵ�y(t��ng)���F(xi��n)���ϕr�������г��l(f��)�����ϵ���ȣ�ͬ�r��һ����_ʼ������������ָ��������r�£������ͬ�r��������(d��ng)ijһ��ȳ��F(xi��n)���ϕr��ϵ�y(t��ng)�г��l(f��)�����ϵ���ȣ����Æ���ȷ�ʽ���������ϵ�y(t��ng)�������ʣ���늙C����ȿ���ϵ�y(t��ng)��һ������p��ȵğ��ݿ��Ʒ�ʽ������(n��i)���p�������늙C�������ϵ�y(t��ng)�M���о���Ҫ�������������I(y��)��W(xu��)���������պ����W(xu��)���Ͼ����պ����W(xu��)��
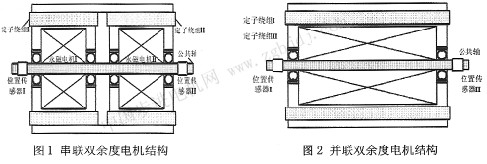
1.1�p�������ͬ��늄әC�����Y(ji��)��(g��u)
����(j��)�p�������ͬ��늙C�ڽY(ji��)��(g��u)�ϵIJ�ͬ���ɷ֞�ɷN��ͣ���(li��n)�Y(ji��)��(g��u)�ͺʹ�(li��n)�Y(ji��)��(g��u)��[2]��
��(li��n)�Y(ji��)��(g��u)������ͬ��늄әC���Ƀɂ�����������늙Cͬ�Sͬ�����b����Dl��ʾ�����Ѓ��ת������@�M���ɂ����_���D(zhu��n)�輰����λ�Â������������й�ͬ��늙C�S����ԓ�Y(ji��)��(g��u)�У��������ڃ����@�M���Ĵ���ϬF(xi��n)���ƺ��Σ����䌍�H�����Ƀ��_늙C��(li��n)�M�ɵģ�����w�e�^��ͬ�rһ��늙C�l(f��)�����ϕr��ԓ늙C���ɞ���һ�_늙C��ؓ�d���Ķ�ʹ��늙C�ęC늕r�g����(sh��)׃�ӑB(t��i)���Խ��͡�
��(li��n)�p��ȽY(ji��)��(g��u)ֻ��һ���D(zhu��n)�ӣ������F���ϸ���Ƕ�������ת�����늘��@�M������(y��ng)�ă���λ�Â�����������늙C�S�����D(zhu��n)�ӣ��p���@�M���Ƀ����g���30��늽Ƕȵ����༯���@�M��(g��u)�ɣ������pY�νӷ����γɲ�(li��n)ʽ�p��ȽY(ji��)��(g��u)����Y(ji��)��(g��u)ʾ��D��D2��ʾ���c��(li��n)ʽ�p��ȽY(ji��)��(g��u)��ȣ���(li��n)ʽ�Y(ji��)��(g��u)�pС��ϵ�y(t��ng)���w�e����늙C�@�MǶ�žW(w��ng)�y�����҃����@�M�g���ڴ���ϣ���˿��ƽY(ji��)��(g��u)�^��(f��)�s��
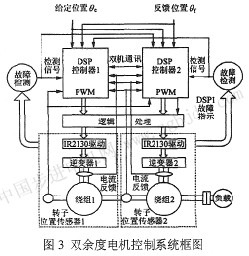
1��2�p�������ͬ��늄әC����ϵ�y(t��ng)���g(sh��)
�D3��һ�N�p�������ͬ��늄әC���Ʒ�����ԓϵ�y(t��ng)���Ѓ����(q��)����������λ�Â�����������CPU���������ɂ�CPUͨ�^�֮�gͨӍ���p��ȹ����r��CPU̎�����Ă�ݹ���ģʽ��һ��CPU���ƃɂ��(q��)��������(d��ng)CPU�l(f��)�����ϕr����һ��CPU�ӹܹ���CPU���΄�(w��)���@�N������ʽ�����˃ɂ�cPu���Ƶ�ͬ���Ԇ��}�����������r�������@�M����_늙Cͬ�r��������(d��ng)ijһ���@�M��һ�_늙C�l(f��)�����ϕr��ϵ�y(t��ng)�ɏ��p��ȹ���ģʽ�D(zhu��n)���ͨ������ģʽ��
��(d��ng)ijһ���(q��)�����l(f��)�����ϕr��ϵ�y(t��ng)ͬ�ӏ��p��ȹ���ģʽ�D(zhu��n)���ͨ������ģʽ�������Ϸ�����֪��ԓ���Ʒ����ĽY(ji��)��(g��u)�Ͻ�Q������ͬ��늄әC����ȫ�p��ȿ��ơ�
|