����CPU��CPLD���_�P����늙C�{��ϵ�y�OӋ
�x�l�ţ��S־�������ѽ�
(���Ϲ��̌WԺ��������̶411101)
ժҪ���_�P����늄әC�{��ϵ�y��һ�N�����{��ϵ�y�����½�B���_�P����늄әC�{��ϵ�y�Ļ���ԭ�������OӋ��һ�N��cPu+cPLD���F���_�P��j��늄әC�{��ϵ�y���M���ˌ��yԇ����������������y�����_�P����늄әC�Y��ϵ�y�����ܣ�����C��ԓϵ�y�\�пɿ���
�P�I�~���_�P����늄әC���{�٣�cPu+cPLD���ز����ƣ��Ƕ�λ�ÿ���
0ǰ��
�F���_�P����늙C�Ǵ���늄әC�������Ӽ��g��Y�϶��a����һ�N�C�һ�w���Ŀ����b�ã��ַQ�_�P����늙C�{��ϵ�y(switched Reluctance Motor Drives��sRD)����20���o90���Ѹ�Ͱlչ������һ�N�����{��늙C��ϵ�y�����ĽY�����ΈԹ̣��{�ٷ��������{�����܃����������������{�ٷ����ȶ������^�ߵ�Ч�ʣ�ϵ�y�ɿ��Ըߣ��Ǹ����о����_�l�ğ��c֮һ���aƷ���_ʼ������늄�܇�ӡ����������ͨ�ù��I�����չ��I���ŷ�ϵ�y�ȸ����I�ʬF����İlչ������sRD늙C�ĽY���Ȼ\�ͮ���늄әC���Σ���sR늙C�Ŀ���Ҫ�����ؓ�d���\�Зl���IJ�ͬ���ڲ�ͬ���D������λ����ͨ������@�M�����_�P�������@�Ӽ������늙C���Ƶ��`���ԣ�Ҳ������늙C�\�п��Ƶď��s�ԡ��@Ȼ�����������ܛ���cӲ����Y�ϵĔ��ֿ���ϵ�y��sR늙C�M�п��ƣ�sRD���ܵ���߱�Ȼ�ܵ�һ�������ƣ�ͬ�r��������Ӳ���·�����^�ڏ��s��������ˣ����˺��������·���������sR늙C���Ʒ�ʽ�`���׃�ă��c������ϵ�y�Ĺ��ܣ��б�Ҫʹ�Ô��ֿ���ϵ�y��sR늙C�M�п��ơ������OӋ��һ����cPu+cPLD����ƺ��ĵ��_�P����늄әC�{��ϵ�y��
1�_�P����늄әC�{��ϵ�y���ɼ����Ʒ�ʽ
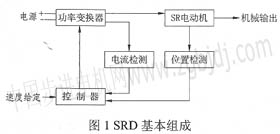
sRDϵ�y��Ҫ���IJ��ֽM�ɣ�sR늙C���w������׃�Q������������λ�ú�����z�y��������֮�g���Pϵ��Dl��ʾ��
sR늄әC������ϵ�y�Ĉ��в���������׃�Q����sR늄әC�ṩ�\�D����Ҫ���������䱾������늳ػ����Դ������õ���ֱ��늹�늡�����Ҫ�ɹ����_�P���m�����·�M�ɣ����F��ܵ��D�Q�������������������·�ĽY����ʽ�c���늉���늄әC���������_�P�����N����P��
λ�Ùz�y�����D��λ�ü��ٶȵ���̖���ṩ�ߣ����Á��_���D�ӴŘO������λ�á���������횽���λ�Ùz�y���@�õ��D��λ����Ϣ���Ա��C��ǡ���r�̽�ͨ����_���������@�M���Ԯa����ͬ��늴��D�أ��@�ò�ͬ���D�١��D���\�Р�B����������ϵ�y���ИУ����C��̎���ٶ�ָ��ٶȷ�����̖�������������λ�Â������ķ�����̖���Ķ����ƹ���׃�Q�������_�P�����Ĺ�����B�����F��sR늄әC�\�Р�B����K���ơ�
�_�P����늄әC�Ŀ��ƅ����飺�����@�M늉�Us���_ͨ�Ǧ�o�c�P��Ǧ�off���p�O����늄әC�Ŀ��ƾ�����κ�����׃�@�������ƅ������_���\��Ҫ������׃���ƅ����IJ�ͬ��ʽ���_�P����늄әC��3�N���Ʒ�ʽ�����Ƕ�λ�ÿ���(Angular Positlon control�����QAPc)������ز�����(cuITent chopping contr01�����Qccc)�c늉�����(vo1tage coIltrol�����Qvc)�����У�APc��늉����ֲ�׃��ͨ�^��׃�_ͨ�Ǻ��P����{��늙C�D�ش�С���m��늙C�^���م^�����nj���ÿһ�����D���c�D�ش_�����\���c���_ͨ���c�P����ж�N�M�ϣ�ÿһ�N�M�ό�����ͬ�����ܣ����w�����^���s���Һ��y�õ��M������ܡ�ccc_�ɑ�����늙C���م^���Ǟ�����������^�����_�PԪ����늙C���S��****�������ȡ�ķ�����ccc���H�����{��늉�����Чֵ���cAPc��ƣ���Ҳ�����S�D�١�ؓ�dҪ���{���_�P�ǣ�vc���ڹ̶����_�P�Ǘl���£�ͨ�^�{���@�M늉�������늙C�D�٣�����ֱ����PWM�ز��{�������_�P�ز��{���c�o�ز��{�������o�ز��{����ͨ�^�{������늉���푑�늙C�D��Ҫ���������ٶȷ�����ֻ��һ���\��ģʽ�������}�_��ʽ��
2����cPu+cPLD�_�P����늙C�������OӋ
�_�P����늙C�ǵ��͵ęC�һ�w���b�ã�������늙C�������\�У��x���_늙C����������������ϵ�y���ИУ����C��̎���ٶ�ָ��ٶȷ�����̖�������������λ�Â������ķ�����̖���Ķ����ƹ���׃�Q�������_�P�����Ĺ�����B�����F��sR늄әC�\�Р�B����K���ơ��_�P����늙C�Ŀ��Ʒ�ʽ�����о��_�P����늄әC�{��ϵ�y�е�һ���dz���Ҫ�Ć��}�������OӋ�ˌ��F�_�P����늙C�Ŀ���ԭ����cPu+cPLD����������ϵ�y�OӋԭ����D��D2��ʾ��
|