����ͬ��늙C(j��)ֱ���D(zhu��n)�ؿ���ϵ�y(t��ng)�O(sh��)Ӌ(j��)
����1����ϼ2��Ф��2
(1���|��ʡ���ٹ�·�����ֵ��|����̎���|�����|118000��2�����(y��ng)���I(y��)��W(xu��)���|�����(y��ng)110870)
ժҪ�����½�B������ͬ��늄�(d��ng)�C(j��)ģ�ͺ�ֱ���D(zhu��n)�ؿ���ԭ������ֱ���D(zhu��n)�ؿ�����Փ�Ļ��A(ch��)�ϣ����IJ��ÿ��gʸ���{(di��o)�Ƽ��g(sh��)����(sh��)�F(xi��n)ȫ��(sh��)�ֻ����ơ���ϵ�y(t��ng)����TI��˾�Ĕ�(sh��)����̖(h��o)̎����-TMS320F2812��������Ŀ������������քe��Ӳ����ܛ���������M(j��n)���f(shu��)������(sh��)�(y��n)�Y(ji��)��������ԓ�����������õĄ�(d��ng)�B(t��i)푑�(y��ng)���{(di��o)�����ܡ�
�P(gu��n)�I�~������ͬ��늄�(d��ng)�C(j��)��ֱ���D(zhu��n)�ؿ��ƣ���(sh��)����̖(h��o)̎����
O����
ֱ���D(zhu��n)�ؿ���(DTC)���˂��y(t��ng)ʸ�����ƵĽ���˼�룬���ö��Ӵ�朶���ֱ�ӿ��ƶ��Ӵ�机��D(zhu��n)�أ�ʹ����п��ƽY(ji��)��(g��u)��(ji��n)�Ρ���(d��ng)�B(t��i)���ܺõȃ�(y��u)�c(di��n)��
���IJ��ÿ��gʸ���}���{(di��o)�Ƽ��g(sh��)(SVF��WM)���Խ���늙C(j��)�D(zhu��n)���}��(d��ng)���p�������׃�����������õ�DSP��TI��˾�Č���늙C(j��)����оƬ����(du��)����ͬ��늄�(d��ng)�C(j��)�M(j��n)��ֱ���D(zhu��n)�ؿ��ƣ���(sh��)�F(xi��n)������ͬ��늄�(d��ng)�C(j��)��ȫ��(sh��)�ֿ��ơ�
1����ͬ��늄�(d��ng)�C(j��)��(sh��)�W(xu��)ģ��
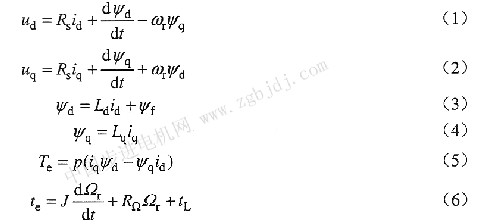
���O(sh��)����ͬ��늙C(j��)���������εķ�늄�(d��ng)��(sh��)���Σ������]��·ͣ�����늙C(j��)�еĜu���p�ĺʹŜ��p�ģ��ɵõ������D(zhu��n)��ͬ�����D(zhu��n)����(bi��o)ϵ��d-q�Sϵ�µĔ�(sh��)�W(xu��)ģ�͞飺
ʽ�У�ud��uq����d����q�քe��d-q�S�ϵĶ���늉��ʹ�朣�Ld��Lq�քe��d��q�S����늸У�
��f�������w��朣���r���D(zhu��n)��늽��l�ʣ�p��ŘO��(du��)��(sh��)��Rs�鶨���@�M��裻te��ݔ��늴��D(zhu��n)�أ�tL��ؓ(f��)�d�D(zhu��n)�أ�J���D(zhu��n)��(d��ng)�T������r���D(zhu��n)�әC(j��)е���ٶȣ�R��������ϵ��(sh��)��
2����ͬ��늄�(d��ng)�C(j��)ֱ���D(zhu��n)�ؿ���
ֱ���D(zhu��n)�ؿ��Ʋ��ÿ��ƶ���늉�ʸ����(l��i)���ƶ��Ӵ�朣�ͨ�^(gu��)����늉�ʸ���ď������usr���Ʒ�ֵ��s��׃����������������������Ʀ�s���D(zhu��n)�٦�s����ʽ(7)��ʾ��
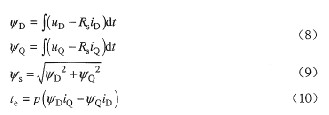
�ڶ���DQ�У����Ӵ��?zh��n)�����s�ăɂ�(g��)������D���ͦ�Q����ʽ(8)��(9)��Ӌ(j��)����(l��i)���������ֵ��Ӌ(j��)ֵ��s���D(zhu��n)�ع�Ӌ(j��)ֵte��
���gʸ���{(di��o)�Ƽ��g(sh��)(SVPWM)����ʹ늙C(j��)�@��һ��(g��)�㶨�ĈA�δň�(ch��ng)���䲻ͬ�_�P(gu��n)�M��늉����������l��ʾ�����ȅ^(q��)�ֲ��D��Dl��ʾ����6��(g��)�ȅ^(q��)��8��(g��)늉�ʸ����
3����ͬ��늄�(d��ng)�C(j��)ֱ���D(zhu��n)�ؿ���Ӳ���O(sh��)Ӌ(j��)
Ӳ���O(sh��)Ӌ(j��)�ϣ�����TI��˾��DSP��2000ϵ��TMS320F2812������IPM���ܹ���ģ�K������������׃��Ԫ����DSP+IPM��ģʽ������DSP TMS320F2812��(sh��)�F(xi��n)�Ĺ�����Ҫ�У�I/O̎��(����������̖(h��o)����ͣ�������D(zhu��n)��)��λ�á��ٶȡ�����z�y(c��)Ӌ(j��)�㣻Park��׃�Q��Clark׃�Q���D(zhu��n)�غʹ�朹�Ӌ(j��)�㷨���ٶȡ��D(zhu��n)�ء�����{(di��o)��(ji��)����늉����gʸ��SVPWM���ơ�늉�����׃�������ܹ���ģ�K(IPM)��(l��i)��ɡ���IPM��Ҫ����DSP�l(f��)�͵�SVPWM��̖(h��o)������IPM��(n��i)����6��(g��)IGBT�����_�P(gu��n)�ܽM�ɵ���׃�·��ͨ�࣬�a(ch��n)��늉����gʸ����늄�(d��ng)�C(j��)�ęz�y(c��)�·��������z�y(c��)���ٶ�(��λ��)�z�y(c��)�M�ɡ�����z�y(c��)�·�ɻ������������z�y(c��)����A��B��C�������(j��ng)�^(gu��)���x�Ŵ���D(zhu��n)�Q��늉���̖(h��o)��ݔ��DSP����(n��i)��A��Dģ�K�M(j��n)��̎�����ȴ�Clark����ģ�K̎�����ٶ�(��λ��)�z�y(c��)�·�x�ö�Ħ��2500��������ʽ��늾��a����(l��i)��ɡ��ľ��a��ݔ���ă�·������̖(h��o)ֱ���cTMS320F2812���������a�}�_(QEP)���B�ӡ��Ķ�Ӌ(j��)����D(zhu��n)�ӽ�λ�ü��D(zhu��n)�١��D2������ͬ���
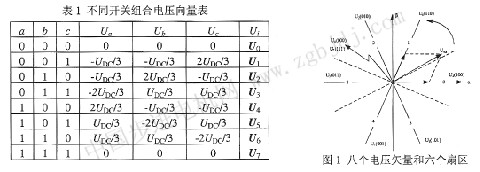
�C(j��)ֱ���D(zhu��n)�ؿ���ϵ�y(t��ng)��D��
SVM-DTC����ϵ�y(t��ng)ԭ����D��D2��ʾ�����Ѕ���늉�ʸ��Ӌ(j��)���Ԫ�Ϳ��g늉�ʸ���{(di��o)�Ɔ�SVM����˳�Ҏ(gu��)DTC�еĴ�朡��D(zhu��n)���h(hu��n)���^�����_�P(gu��n)����
�ڈD2�У��������ٶȦ� rx�c�������ٶȦ� r֮�(j��ng)�D(zhu��n)���{(di��o)��(ji��)��ݔ�������D(zhu��n)��ָ��t ex�� |