�в�����늙C�ŷ����Ƽ��g(sh��)�о��Mչ
ժҪ������늙C���É���մɵ��扺�Ч��(y��ng)��������D(zhu��n)����Cе�ܣ�늙Cݔ��ݔ��֮�g�������@�ķǾ��Ժ͕r׃�ԣ����¿��Y(ji��)�ˇ���(n��i)���в�����늙C���Ƽ��g(sh��)�İl(f��)չڅ�ݣ�Փ�����в��ͳ���늙C�ٶȿ��ƺ�λ�ÿ��Ƽ��g(sh��)���о��Mչ��
�P(gu��n)�I�~������늙C���ŷ����ƣ��о��Mչ
O����
����늙C(u1��sonic Motor���QuSM)�LJ����ʮ����l(f��)չ����������늙C������һ�N������մ��扺�Ч��(y��ng)���l(f��)���^��������(q��)������ͨ�^��N���ģʽ���D(zhu��n)�Q�c��ϣ�ʹ���
�D(zhu��n)׃�əCе�ܵ��(q��)���b�á������������늙C����һ�Nֱ���(q��)��늙Cȡ�����w�ٰl(f��)չ���������ŷ����Ʒ���������F(xi��n)���䃞(y��u)���������ԡ�����늙C�ij��F(xi��n)���F(xi��n)�ڃH��ʮ����ĕr�g�������ѽ�(j��ng)��(y��ng)���ڹ��I(y��)���ơ����܃x���x������܇����������k���Ԅӻ��O(sh��)�䡢���ܙC���˵��I(l��ng)���С�����늙C�ƏV��(y��ng)�ú������(q��)�ӿ��Ƽ��g(sh��)�ֲ��_�ģ�ֻ�нY(ji��)����Ч�Ŀ��Ʒ����Ϳ��Ʋ��ԣ����ܳ�ְl(f��)�]��늙C��****���ܡ�
1�в�����늙C�ٶȿ��Ƶ��о�
����늙Cݔ��ݔ��֮�g�������@�ķǾ��Ժ͕r׃�ԡ��D(zhu��n)�ٿ�����Ҫ�֞�p��늙C�r׃���ԵĠ�B(t��i)�������ƺ��D(zhu��n)�پ��_�{(di��o)����ݔ���������ơ�
1 1��B(t��i)��������
���˿˷��C���c�S늙C�ض�׃����Ư�ƣ�ͨ���к�O늉����ƺͺ㼤��늉�����迹�ǿ��ƃɷN�������������@��Ʒ�ʽ�У��������������������D(zhu��n)��ֵ������늙C�����Ġ�B(t��i)��������(sh��)���D1��1992���ձ���Funlya�O(sh��)Ӌ�Ļ���H�{(di��o)��(ji��)���ĹO��������D�z��ʹ�O늉�E s�������S늙C�ض�׃����׃�����p���ɜ���������늙C�D(zhu��n)��׃�����D2�����O(sh��)Ӌ�ĺ��迹�ǿ؈D��
�������ɼ�늙C늉���̖�������̖����(j��ng)�b������a(ch��n)����늉���̖�ɷ�ӳ�в�����늙C��Ч�·���迹��׃����������ͨ�^�{(di��o)���l�ʿ���ԓ늉���̖������׃���˷�늙C�C���c�����������׃����
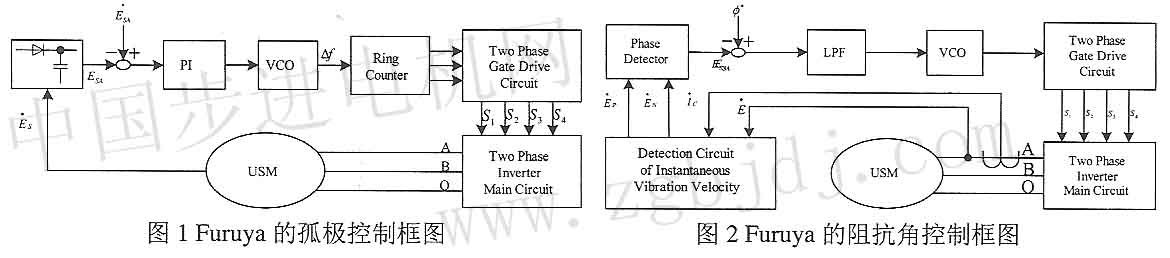
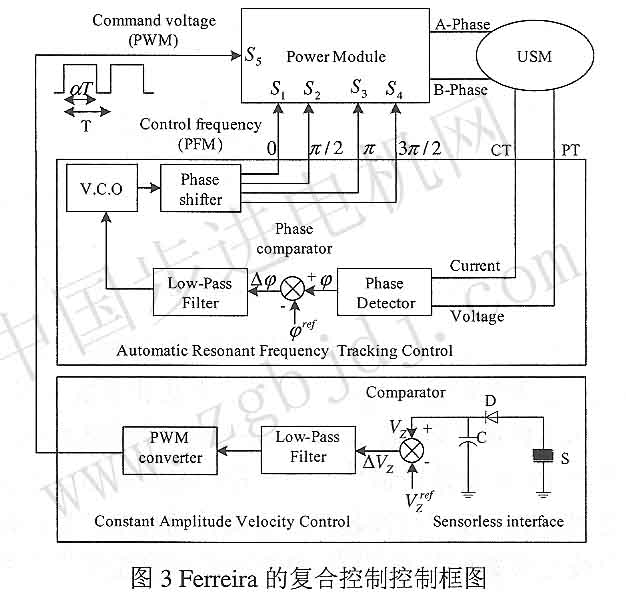
1998�귨����Ferreira����˹O늉����迹���p�]�h(hu��n)��(f��)�Ͽ����ţ�ϵ�y(t��ng)��D��D3��ʾ������(j��)�迹�ǡ��{(di��o)��(ji��)�(q��)���l�ʁ��˷��C���cƯ�ƣ����ø���(j��)�O늉���l��PWM����ռ�ձ�
�˷�����ؓ(f��)�d׃����ɵ��C���c׃�����M���˷��D(zhu��n)��׃����
1 2ݔ����������
��Q�в�����늙Cݔ��ݔ���g�ķǾ����P(gu��n)ϵ�̈́ӑB(t��i)��(sh��)�W(xu��)ģ�͵IJ����_�ԣ��ٶȿ����㷨��ͨ��Ҫ����ģ������(j��ng)Ԫ�����ܭh(hu��n)��(ji��)��׃����(sh��)�{(di��o)��(ji��)���в�����늙C�D(zhu��n)�ٿ��Ƶ���Ҫ������
����(n��i)��W(xu��)�����Ì��H�D(zhu��n)�ٻ��D(zhu��n)���`���׃�����c�D(zhu��n)���`������ݔ�똋(g��u)�ɶ�Ԫģ���������������l���{(di��o)��(ji��)���в�����늙C���D(zhu��n)�������M�������P(gu��n)�����о���ͨ�^���H�D(zhu��n)���O(sh��)Ӌģ��Ҏ(gu��)�t������ֱ���w�F(xi��n)늙C�ķƾ��ԣ����D(zhu��n)�ظ�׃�r��ģ����������ݔ��ݔ����Ҫ���^���{(di��o)�����ڸ�ۙ������ģ��Ҏ(gu��)�t���ƶ������y�ȡ�
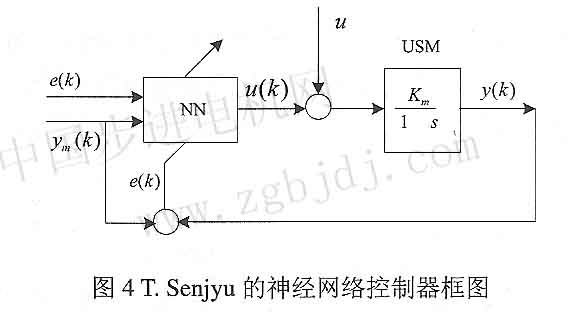
������(j��ng)�W(w��ng)�j(lu��)���бƽ�����Ǿ��Ե�������1998��T Senjyu����BP��(j��ng)�W(w��ng)�j(lu��)(NN)���ھ��ԌW(xu��)��(x��)�����m��(y��ng)���ܣ��ھ��{(di��o)���������Y(ji��)��(g��u)����(sh��)��ͨ�^��׃�(q��)���l���{(di��o)��(ji��)늙C�D(zhu��n)�٣��˷�늙C
�\�Еr�ķǾ��ԣ��������Y(ji��)��(g��u)��D4��ʾ���ڿ������У��D(zhu��n)�ٵ��O(sh��)��ֵ���D(zhu��n)���`������W(w��ng)�j(lu��)ݔ�룬�l�ʵ��{(di��o)��ֵ����ݔ����
���˽�Q�ο����㷨����Ч�����Ć�K��T Chau�O(sh��)Ӌ�˻�����(j��ng)�W(w��ng)�j(lu��)ģ���������D(zhu��n)�ٿ�����(NFC)���������Y(ji��)��(g��u)��D5��ʾ�衣�����������l�ʡ�늉�(ռ�ձ�)�p�{(di��o)��(ji��)�����ƣ������{(di��o)���{(di��o)�پ��Ի��̶ȸߵ����Ծ����в�����늙C�IJ�
|



