�����z���㷨�ĸБ�(y��ng)늄әC��(w��n)�B(t��i)ģ�ͅ���(sh��)���R
�_�i�x������ͤ
(���ִ�W(xu��)���V�|�麣519041)
ժҪ����B�˸Б�(y��ng)늄әC���y(t��ng)�ą���(sh��)�yԇ�c�R�e����������˻����z���㷨�ĸБ�(y��ng)늄әC��(w��n)�B(t��i)ģ�ͅ���(sh��)���R���������Ì��H���y��늄әC������D(zhu��n)�ٔ�(sh��)��(j��)���Y(ji��)�ϸБ�(y��ng)늄әC��(w��n)�B(t��i)ģ��������Է��̣�ͨ�^�z���㷨�M�������M�ϵõ�늙C��(w��n)�B(t��i)ģ���������������늙C��(w��n)�B(t��i)ģ������(sh��)ֵ��ԇ��C��ԓ�O(sh��)Ӌ����(sh��)���R�����c���y(t��ng)�yԇ������ȣ���(zh��n)�_�Ժ;��ȶ����^�����ߣ��Mһ����C��ԓ�O(sh��)Ӌ�����Ŀ����Ժ���Ч�ԡ�
�P(gu��n)�I�~���z���㷨�������M�ϣ��Б�(y��ng)늄әC������(sh��)���R
�ЈD���̖��TM346 �īI��(bi��o)�R�a��A ���¾�̖��1004��7018(2010)01��0051��03
1���y(t��ng)�ą���(sh��)�yԇ�����ʹ��ڵľ�����
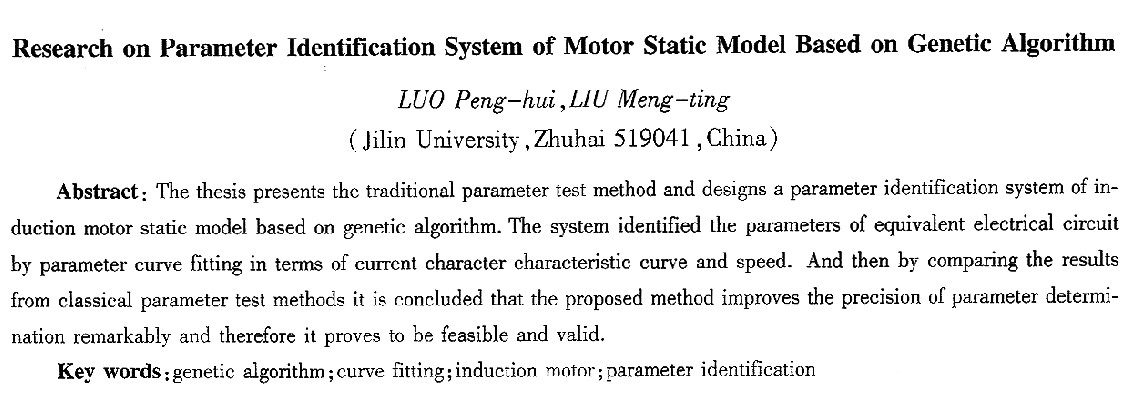
���y(t��ng)�ĸБ�(y��ng)늄әC��(w��n)�B(t��i)ģ��T�ε�Ч�·����(sh��)�yԇ������ͨ�^ֱ��ԇ���dԇ�Ͷ��D(zhu��n)ԇ�[1]�õ����Б�(y��ng)늄әC���dԇ�ͨ�^�y�����d�����Դ_��늙C�Cе�p�ġ��F�p�ļ�����迹���ڿ��d�\�Зl���£�늙C�����@�M���l�ʞ��~��ֵ���������Q늉���늙C�����κΙCеؓ(f��)�d���Խӽ���ͬ���ٵ��D(zhu��n)�ٿ��D(zhu��n)���@�r�D(zhu��n)��������D(zhu��n)���~�Ķ���С���۳��Cе�p��֮����J(r��n)���D(zhu��n)��֧·�_·���Б�(y��ng)늄әC���D(zhu��n)ԇ�(�ַQ��·ԇ�)ͨ�^�y�����D(zhu��n)�����Դ_����·�迹���ڶ��D(zhu��n)�\�Зl���£�늙C�����@�M�Խ��l�ʞ��~��ֵ���������Q늉�����늙C������������ֹͣ�D(zhu��n)�ӣ��@�r���֧·���迹�����D(zhu��n)��֧·��ö࣬ʹ�D(zhu��n)��������D(zhu��n)���~�ĺܴ��F�p�ĺܵͣ��ʿ��J(r��n)����֧·�_·��T�ε�Ч�·�ڿ��d�Ͷ��D(zhu��n)�ɷN������l���¿��Եõ���������D1��ʾ��
���y(t��ng)�ą���(sh��)�yԇ�����m����Ӌ�㺆�εă�(y��u)�c����ͬ�rҲ����һЩ������[2-4]
(1)���d�yԇ�����麆���yԇ�·��ʡ�����D(zhu��n)�ӻ�·�����D(zhu��n)�yԇ�����麆���yԇ�·��ʡ���˄�Ż�·���@���������\�Р�r�����H�Ͽ��d�r�D(zhu��n)�ӻ�·������һ���ēp�ģ������D(zhu��n)�r��Ż�·Ҳ����һ���ēp�ģ���˿��d�yԇ�Ͷ��D(zhu��n)�yԇ������Ȼ����һ�����`�
(2)����C������(d��ng)늙C���D(zhu��n)���h(yu��n)���ڌ��H�\�Еr���D(zhu��n)��r���D(zhu��n)�ӵļ��wЧ��(y��ng)��(y��n)�أ������D(zhu��n)ԇ�r늙C���D(zhu��n)��s=1���@�Ӿ͕���(d��o)��(y��n)�صļ��wЧ��(y��ng)��ʹ������@�M����(sh��)�c���H�\�Еr�Ķ����@�M����(sh��)��������@ƫ��y������(sh��)���F(xi��n)�`�
(3)���ڶ��D(zhu��n)ԇ�������M�У�늙C�Ą��ˮƽ�h(yu��n)���ڌ��H�\�Еr�Ą��ˮƽ���@Ҳ��(d��o)����늙C����(sh��)ƫ�x���H�\�Еr�ą���(sh��)��
2 �Б�(y��ng)늄әC�ķ�(w��n)�B(t��i)��Ч�·ģ�ͺ�������Է���
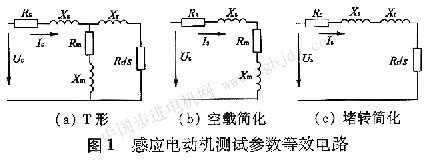
��(d��ng)���ཻ���Б�(y��ng)늄әC�Ķ����@�M�ӵ��������Q�Ľ����Դ�r�����ښ�϶�Юa(ch��n)�����D(zhu��n)�ň�������(j��)��ͨ��(j��ng)�^��;�������|(zh��)����ͨ�ɷ֞�����ͨ��©��ͨ�ɴ����D2��ʾ������ͨ��ָͬ�r�c�����D(zhu��n)���@�M��朣��ښ�϶����ͬ���D(zhu��n)�����D(zhu��n)�Ļ�����ͨ��  �����@���ִ�ͨͬ�r��朶��ӡ��D(zhu��n)���@�M���ڶ��D(zhu��n)���@�M�a(ch��n)���Б�(y��ng)늄ݣ��M�������D(zhu��n)�Q���ʷQ�������ͨ���Б�(y��ng)늄әC������ͨ�����D(zhu��n)��ͨ������ܲ��ؚ�϶�A�ܰ�����Ҏ(gu��)�ɷֲ�������ͬ���D(zhu��n)�����D(zhu��n)����ֵ�Ĵ�С�������ܲ�ÿ�낀���Ĵ�ͨ����©��ͨ��ָ�H�c�����@�M���D(zhu��n)���@�Mһ����朵Ĵ�ͨ�������@�M��©��ͨ�ֳ������֣�һ���֞��©��ͨ����һ���֞�˲�©��ͨ���������֞��C��©��ͨ����©��ͨ��ָ�M�����Ӳ۵�©��ͨ���˲�©��ͨ��ָ�c�����@��˲���朵�©��ͨ���C��©��ͨ��ָ��϶�г�����ͨ(������ͨ)����C����ͨ���ַQ��©�š�
3 �����z���㷨�ĸБ�(y��ng)늄әC��(w��n)�B(t��i)ģ�ͅ���(sh��)�M��
�O(sh��)�Б�(y��ng)늄әC��(w��n)�B(t��i)ģ��������y��ֵ��I(Sk)=[I1(Sk)I2(Sk)...In(Sk)]T,����n�錍�H�y���Б�(y��ng)늄әC�����ֵ̖�Ă���(sh��),I(Sk)���j�������̖���D(zhu��n)���ʞ�Sk�r�Ĝy��ֵ,�ָ߸Б�(y��ng)늄әC���ֵ�����Č��Hֵ��X(Sk)=[X1(Sk)X2(Sk)...Xn(Sk)]T,�t��I(Sk)=X(Sk)+��(Sk),���Цر�ʾ�y����,���O(sh��)�y���������,���M���(bi��o)��(zh��n)���B(t��i)�ֲ�N(�̦�2);�䷽���ȡֵ��y��ƽ��ֵ��ij���ٷֱ�.
|