�����@���C�ğoˢ늙C�ӵ�Ӌ��C����
��ժҪ1���Ƚ�B�������@���C�ğoˢ늙C��ϵ�y���ɣ��������乤�r���c���ڴ˻��A�������ϵ�y��Ӌ��C���Ʋ����Լ����F����ӑՓ�˟oˢ늙C���ٶ��]�h���ƺ���ӄx܇���}I���Ҫ�����ϵ�y���{ԇ��r
[�P�I�~]�@���C���oˢ늙C��������̖�����������Ʋ���
Ŀǰ�@���C����ϵ�yһ����CNC(Computer��
ized Numei-��ical C0ntr01)�@���C���������Б�늙C���Б�늙C׃�l�������M늙C����š��Cе�x܇���M�ɣ����ȣ��@���CҪ����늙C���п��ن��ӡ����لx܇�������e���@���Cͣ܇�rҪ�ʴ_(��cNc�@���C�������O���@100Ȧ��늙C�D100Ȧ�͵�ֹͣ)����һ��ĸБ�늙C׃�l���]����ӄx܇�Ĺ��ܣ�ֻ�������ⲿ��늴ńx܇�����Ҫ����늴ńx܇����ʹϵ�y�Y�����s���w�e�^�x܇�������������ӣ�
ϡ�����şoˢֱ��늄әC(���º��Q�oˢ늙C)���@���C����ϵ�y��������늙C��������֪���oˢ늙C�����c��ˢֱ��늄әC�����������ӡ��{�ٺͿ������ܣ���늙C�܉F���d(���^�d)���Ӻ͟o���{�٣��e�������Ը����oˢ늙C�Ļ�����̖���^���_���M���@���C��λ�ÿ��ƣ��@�Ӳ��H���Ժ���ϵ�y�ęCе���·�Y�������ͳɱ�������߀������ϵ�y�����w���ܣ�ʹ�@���C�������Ј���������
�������Ƚ�B�������@���C�ğoˢ늙C��ϵ�y���ɣ��������乤�r���c���ڴ˻��A�������ϵ�y��Ӌ��C���Ʋ����Լ����F������ӑՓ�˟oˢ늙C���ٶȲɘӺ���ӄx܇���}�����Ҫ�����ϵ�y���{ԇ��r��
1 ϵ�y�M�ɼ����r
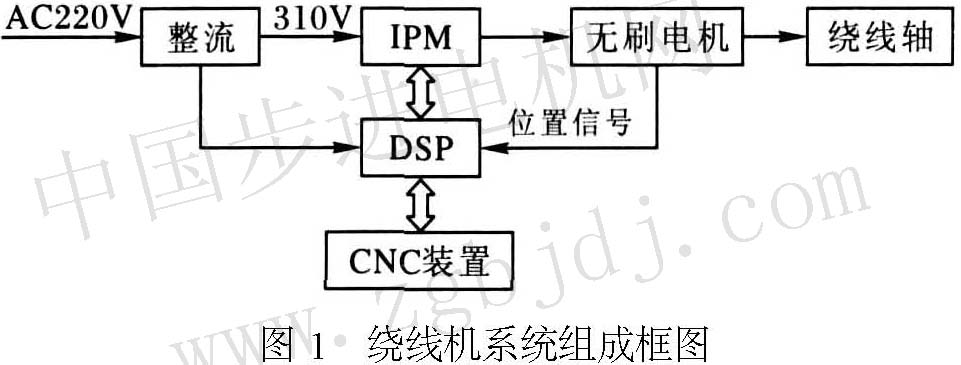
�@���C��ϵ�y�M����Dl��ʾ��ԓϵ�y��220v�����Դ��늣������������׃��310 vֱ��늉��o��������늣��x��310 V(Dc)��400 w��6 000RPM�ğoˢ늙C������늙C��ϵ�y��Dsc���ƣ��oˢ늙C��������cNc�@���C����������̖�M
�І���ͣ܇���ƣ�
DSC��ϵ�y�Ŀ��ƺ��ģ�����Ҫ�����ǣ���һ������������̖���F���oˢ늙C�ēQ��ȿ��ƣ��ڶ�������cNc�@���C��������̖����늙C�Ć���ͣ܇������������cNc�@���C�������o���ٶ���̖�M���ٶ��]�h���ƣ�ᘌ��@���C�ⲿ��̖̎���͟oˢ늙C���Ƶ���Ҫ���x��MIcROcHIP��˾��16λ������dsPIC��30F2010���鱾ϵ�y�Ŀ���оƬ��
����28��I��O�ڣ���I��O�ڶ�����25 mA��������������3��ͨ�õ�16λ���r����12 KBƬ���W����g������4��16λݔ�벶�����^�������_��2��16λ���^��PwMݔ���������_��늙C����PwMģ�K��Ƭ��6·l MsD s�D�Q���ʵ�10λģ���D�Q����3���ⲿ�ƽ�Д�Դ�ȵȣ��@��Dsc̎���@���C���ⲿ������̖�Ϳ��Ɵoˢ늙C�ܺ��m�����OӋ�����·�r����Ҫ����̫����ⲿ�·��ʹϵ�y���Ӻ��Ρ��ɿ���
2���Ʋ���
�����@���C�Ĺ��r���c��ϵ�y�Y�������������˼���ǣ����ȣ�����cNc�@���C�������o���Ŀ�����̖����ֹͣ늙C���@���C���@���rؓ�d���Ǻܴ��@һ�cҲ������늙C�Ŀ��ن��ӡ����لx܇��ͣ܇��cNc�@���C������Ҫ���ù���M���ٶȲɼ���Ȼ������������ϵ��O����r׃���o���D����̖��
ϵ�y�Ŀ���ܛ������ģ�K���OӋ��������ֻ�nj��ӳ����M���{�ã����w�������ӳ�����У��ӳ��������늙C�\�D�ٶ��]�h�����ӳ���cNc��������̖�����ӳ��������ӳ���ͣ܇�ӳ��x܇�ӳ���ȣ��������_ʼ̎�ڵȴ���B��һ���z�y��cNc�������Ć�����̖���͕�늙C�\�D���������z�y���x܇��̖�r�͆��ӄx܇�����D���������O�õĿ�Ȧ���r��늙C�Ԅ�ͣ܇��Ȼ����������M��ȴ���B����늙C�����ӻ��\���^���аl�����D��Ҳ���Ԅ�ͣ܇��������˲���ѭ�h��
2��1 cNc��������̖�Ľ���
cNc��������늙C������5�l��̖�����քe�ǹ����ˡ��x܇���ٶ��{�����l����̖�����ӡ������D�ГQ���@Щ��̖��cNc��������늙C����֮�g�Ă��ͣ����M�й�����x |



