�o�S��ͬ��늙Cͨ�����D(zhu��n)�őҸ���ģ���о�
���ĽB1,2���S�A1���fɽ��1���Ƿ�1
(1���A�пƼ���W(xu��)��������h430074��2�����ϿƼ���W(xu��)���������471003)
ժҪ�������˟o�S��늙C��ͨ��늸�ģ�ͣ���(d��o)����ͨ��ͬ�������D(zhu��n)�őҸ���ģ�͡�ԓͨ��ģ�Ϳ�ͬ�r�m�����O���D(zhu��n)�Ӻ͈A�����D(zhu��n)�ӟo�S��ͬ��늙C��������C��ģ�͵����_�Ժ���Ч�ԡ�
�P(gu��n)�I�~���o�S��ͬ��늙C�����D(zhu��n)�őҸ�����ͨ��ģ��
�ЈD���̖��TM341 �īI���R�a��A ���¾�̖��1004��7018(2008)01��0001��03
0����
�o�S��늙C���m���ڸ����\�D(zhu��n)���ϵ�����늙C[1-6]���ڸ����\�D(zhu��n)�У��y������D(zhu��n)���|(zh��)��ƫ�Įa(ch��n)����ͬ�̶ȵ��������x����ӡ����Կ˷��������x������ǟo�S��늙C�ڸ����I(l��ng)��V����(y��ng)�õ��P(gu��n)�I���}֮һ����o�S��늙C��������ͬ����ƵĴőҸ����Ժ�Ҏ(gu��)�ɣ������D(zhu��n)�ӿɿ����O�D(zhu��n)�ӵ�һ�N���������Č��Ծ��ЄŻ������O���D(zhu��n)�ӟo�S��ͬ���C����һ�㻯�Y(ji��)��(g��u)ģ�ͣ�Ԕ���ƌ�(d��o)�����O�����ĘO�o�S��늙C��늸�ģ�ͺ�ͨ��ͬ�������D(zhu��n)�őҸ���ģ�͡�
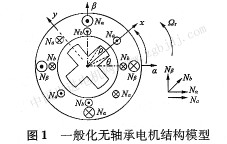
1�o�S��늙Cͨ��늸�ģ��
1��1������϶��ͨ�ֲ�Ҏ(gu��)��
�����oֹ����ϵ�µ��D(zhu��n)���������˞�(������)���t���D(zhu��n)�������Ć�λ���Ț�϶�Ō�(d��o)��[2]��
ʽ�У��Ȟ��ض��Ӄ�(n��i)������rᘙCе�Ƕȣ���0���߅ƽ����϶�L�ȣ�l���D(zhu��n)���L��R���D(zhu��n)����돽��
ʽ(1)�H�m�����D(zhu��n)���O���w�Ě�϶�^(q��)�D1�е��D(zhu��n)���O���w��϶�^(q��)��ɱ�ʾ�飺
���У��՞��D(zhu��n)�ӌ��H���D(zhu��n)�ęCе�Ƕȣ�p���D(zhu��n)���O������һ�롣�D1߀�o����һ�㻯�o�S��ͬ��ģ��
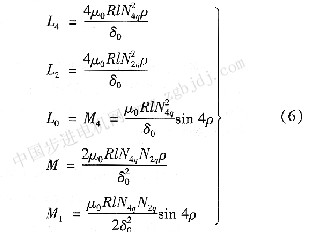
늙C�ĸ��@�M(�S��)λ�÷ֲ�������������D�У��ĘO늙Ca���@�M�Ͷ��O���ئ����@�M���S���غ��ڦ������S���S��λ��̎���t�ؚ�϶�A�ܸ���Ч�����@�M���є�(sh��)�ֲ�Ҏ(gu��)�ɞ飺
���У�N4q��N2q�քe���ĘO(��Ч)����늙C�@�M�Ͷ��O(��Ч)���Ҹ����@�M��ÿ�Oÿ�മ�є�(sh��)��
�����Դ�ͼ���·����������(j��)��˹���ɣ���Ӌ������D(zhu��n)�Ӵ�λ���_ʽ��
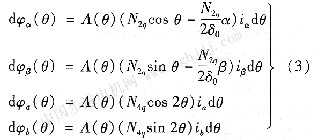
�t�ڦ���϶������(n��i)���ɸ��@�M����a(ch��n)���Ě�϶��ͨ�ֲ�����Ҏ(gu��)�ɞ飺
1��2�oֹ����ϵ�µ�늸о�ꇽ���ģ��
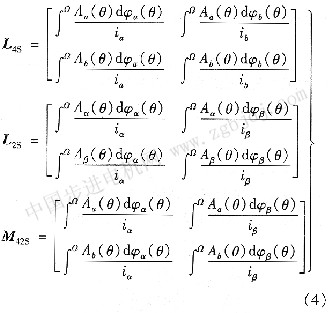
����(j��)��机��@�M������P(gu��n)ϵ���ɶ��x���ĘO�D(zhu��n)���@�M�Ըо��L4s�����O�����@�M�Ըо��L2s�̓����@�M������ϻ��о��M42s��
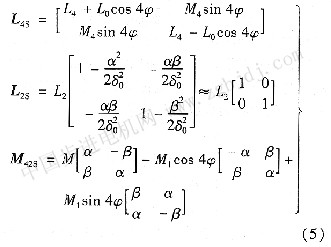
����(j��)ʽ(1)��ʽ(3)����Ӌ��õ��oֹ����ϵ�µĶ��O�����ĘO�o�S��늙C��늸о��ģ�͞飺
���У����L2s�У��s��ʽ�����ėl�����D(zhu��n)��ƫ���ʵ�ƽ���hС��O��5��ԓ�l���ڟo�S��늙C�Ҹ��\�D(zhu��n)��һ�㶼�ܝM�㡣
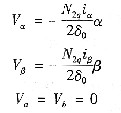
ʽ(5)�У���늸�ϵ��(sh��)ͨ�ý�����ʽ�飺
ʽ�У����ͦ��D(zhu��n)�����oֹ�����S���ƫ��λ�ơ�
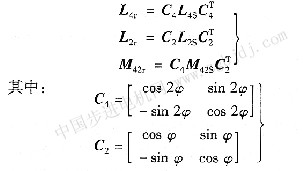
1��3�D(zhu��n)������ϵ�µ�늸о�ꇽ���ģ��
����ϵ���x��xy����ϵ��Cе���g��(n��i)����ͬ�������D(zhu��n)������ϵ��ԭ�c�O(sh��)�ڶ������ľ��ϡ�
�����������D(zhu��n)����׃�Q��
�ɵõ�ͬ�����D(zhu��n)����ϵ�µ�ͨ��늸о��ģ��:
|