���M늄әC����ϵ�y��λ�C�����OӋ
���ܿ������l��
(�������I��W���������710072)
ժҪ�������w�Ϻ�Ҫ��B�˲��M늄әC����ϵ�y�ĽY�����������c��Ԕ����B����λ�Cܛ���Ĺ��ܼ����F���������OӋ�Ŀ��Ƴ�������Ѻõ��˙C�������ԣ����O����N�\��ģʽ���Ɍ��r�@ʾϵ�y�\�Р�B���ҿɑ�������Ҫ���s�����㷨�����ƹ��ܵ�ʹ�È��ϡ�
�P�I�~�����ʽ���M늄әC����Ӌ��C��MCs-51��Ƭ�C��Visual Basic��MSComm�ؼ�
�ЈD���̖��TM383��6 �īI���R�a��A ���¾�̖��1004��7018(2008)04��0003��03
0�� ��
�S�����I���a��Ӌ��C���g�������®�����Ӌ��C�ڹ��I�����I��đ���Խ��Խ�V����������Ӌ��C���Դ惦����Ĕ������M�Џ��s���\�㣬߀����ͨ�^��N��ʽ����Ϣ�M���@ʾ�����⣬߀�����OӋ��Ч���Ѻõ��Ñ����棬��ϵ�y�M�п��ơ�
��ϵ�y�Ԇ�Ƭ�C������λ�C���C������λ�C������ͨ�^RS-232���нӿ��M��ͨ�š���λ�C�OӋ���Ѻõ��Ñ����棬�Ա㌦ϵ�y�M�п��ƣ���λ�C�ڵõ���������֮���w��ʩ���ƣ�����ϵ�y�Ĺ�����B��Ϣ���o��λ�C�M���@ʾ̎����
��Ƭ�C����80C51������λ�C����windows xP����ϵ�y�£���Visual Basic 6 0�_�l�ıO��ܛ������windows�O��ܛ���_�l�У���Ό��F�C�c��Ƭ�C֮�g�Ĵ���ͨ����һ���^����ϵK���������OӋ���P�I֮һ��ϵ�y������VB�ṩ���e���ڴ��пڲ������Ԓ�C�ؼ�һMSComm��ͨ�^�����^���εij���������C�c��Ƭ�C֮�g�Ĵ���ͨ�š�������Ҫ��B��ԓϵ�y��λ�Cܛ���Č��F�^�̡�
lϵ�y���c����
ϵ�y�Ŀ��ƌ����ǻ��ʽ���M늄әC��ͨ�^��λ�Cܛ������λ�CܛӲ����������ϣ�ϵ�y�����������c��
(1)����ͨ�^��λ�C���ƽ����M�п��ƣ�����ֱ�^�����㣻
(2)�����Ӱ������ࡢ�����������ʽ���M늄әC�ڃȵĶ�N���M늄әC��������ϵ�y���m���ԣ�
(3)���а������֡������l�������D���A���l���Լ��A�ò��ȶ�N���ƹ��ܣ��،��˱��ز��M늄әC���m�È��ϡ�
ʹ���߿���ͨ�^��λ�C���ƽ��挍�r���^�y�\���е���ϵ�y���\�Р�B��ͬ�r߀����ͨ�^��λ�C���ƽ��挦ϵ�y�M�п��ƣ����ˌ��F�C�͆�Ƭ�C֮�g�Ĕ������Q��ԓϵ�yʹ���˴���ͨӍ��ʽ���������M늄әC����ϵ�y��D1��ʾ��
2��λ�C�����w����
����λ�Cܛ�������Z�Ե��x���ϣ����ؿ��]���DZ��ڽ���ľ��������M�з���Ĵ���ͨӍ����ˣ�ϵ�y��λ�Cʹ����Visual Basic****�Z�Ծ��̭h�����@�N�Z���e���ڽ��澎��������Ҫ���ǣ�������һ���e�����ͨ�ſؼ�-JMSComm��MSComm�ؼ���Ŀ���Ǟ����Ñ��OӋһ��ϵ�y���Ժʹ��ж˿��M�М�ͨ�����͔�����
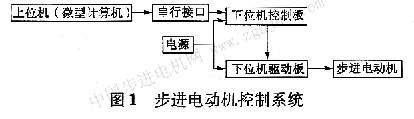
������������λ�C��Ҫ����Ñ��Ľ��������Լ�늙C�\�Р�B�Č��r�@ʾ�����ԣ���λ�Cܛ������Ҫ�܉�����Ñ�ݔ����\��ģʽ�O��������׃������־������Σ�߀��Ҫ����λ�C�����Č��r�\�Р�B�ԈD�λ��ķ�ʽ�@ʾ�������D2��������w��ܡ�
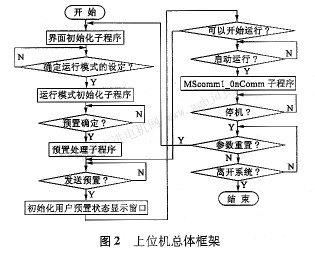
���棬���Դ��ڵ��OӋ�������λ�Cܛ���Ŀ��w�����M���^Ԕ�����U�����Ñ��O��ݔ�˴���ͬ�rҲ�������洰�ڣ��䴰���O����D3��ʾ������
���˳����\�е����п��ƹ��ܣ����w���F�飺
(1)��늙C�\�з�ʽ�O���^���Ñ�����ͨ�^�x������б������г����x��O������늙C���\�з�ʽ�����У�늙C����x����������ࡢ���༰������ʽ���M늄әC������ģʽ�x������������������ּ��ļ��֣������D�x����������D�����D���A��ģʽ�x��������A���l�ʼ��A�ò���
(2)��늙C�A�Å����O���^������x������A���l���\�з�ʽ���Ñ�������ڵ�һ���ı�����ݔ��늙C���\���l�ʣ��@���چ����\�Еr��ϵ�y�������늙C��ͻ���l����u���ٵ��\���l�ʣ���ֹͣ�\�Еr��ϵ�y������늙C��u�p��ֱ��ͣ�C��ֹ������x������A�ò��\�з�ʽ���Ñ�������ڵ� |