���ڵ����W��������ͬ��ֱ��늄әC��λ�íh����
�R���䣬�����s
(�㽭���I��W���㽭����310014)
ժҪ��������P�͌W���㷨�c���y��PID�㷨�Y����������ͬ��ֱ��늄әC��λ�ÿ��ơ���������ͬ��ֱ��늄әC�Ĕ��Wģ�ͺ���Փ����Matlab��simulink�ķ���h���·քe���Ϊ�ʹ��PID��������PID+ILc��������ϵ�y�M�з��棬����Y������ԓ�����܉���Ч���ϵ�y��λ�ø�ۙ���ܡ�
�P�I�~�������W�����ƣ�P�͌W���ɣ�����ͬ��ֱ��늄әC��PID���ƣ�si��dink
�ЈD���̖��TM359��4 �īI���R�a��A ���¾�̖��1004��7018(2008)04��0049��03
O�� ��
�����W�����������ܿ��Ƶ�һ����֧������˼��****���ձ��W��Uchiyam�����ֱ��1984��Ari-moto��Ӣ�İl���Ժ��_ʼ���˂��Pע��ԓ�㷨�m���ھ����؏��\�����|�ı��،���������ه��ϵ�y�ľ��_���Wģ�ͣ�ֻ�����ÿ���ϵ�y����ǰ�Ŀ��ƽ�����ϵ�y�Č��Hݔ����̖������ݔ����̖���`��팤������Ŀ�����̖��ʹ�ñ���ϵ�y�Č��Hݔ��܉�E�����ޕr�g�^�g��������������ݔ��܉�E���F���`�����ȫ��ۙ�����ԓ�㷨�ڌ���Q���y���Ʒ����y�Կ��Ƶď��s���_����ϵ�y���Ъ���֮̎��
�����㷨�������D���㷨���lչ��P�͡�PD�͡�P1D�͡����A�W���㷨�����z�����ӵČW���㷨���Լ����c���m����ģ�����Ƶ����M�����㷨�Y�ϵďͺ����㷨�ȡ������W���㷨�İlչ�Ƅ��˾��Џ��s�����W������؏Ͳ����΄յĿ��ٸ����ܵİlչ�����ѽ��ɹ��đ����ڙC���ˡ��ŷ�ϵ�y�����I�^�̵ȿ����^���С������nj������W�������㷨�c���y��PID�㷨�Y���\��������ͬ��ֱ��늄әC��λ�ÿ����С�Sire��~link����Y��������֪ԓ�����܉����ϵ�y��ۙ���ȡ�1����ͬ��ֱ��늄әC���Wģ�ͼ�����ģ��
����ͬ��ֱ��늄әC�܉�a��ֱ���������ܺܺõؽ�Q���D늙C�ڌ��Fֱ���\���Ў����ķ������^�ͽY�����ԵȆ��}���c��ͬ�r�����ڛ]�Ђ��әC��������ͬ��ֱ��늄әC�ĸ߾����\�ӵČ��F�ܵ��T���䌦ģ�Ͳ��_���Ժ��ⲿ�ɔ_���������Լ��������ӵȵ�Ӱ푡��@Щ�����������X�������ӡ����������ӡ��˲�Ч���ȡ���������ͬ��ֱ��늄әC��λ�ÿ��Ʋ��Ե��о���shih��chang. Hsu���ˌ�ģ��߉�㷨�c���y��PI�㷨�Y�ϣ�ԓ�㷨����늙C�ĽY��ģ�Ͳ������ˏ��s��Ӌ�㣬�õ��˺ܺõĿ��_��Ч����D��M��Alter���˲����ҡ�������ģ�Ͳ��_�������ɔ_�OӋ����λ�ÿ�������ԓ�����mȻ����˿��ƾ��ȣ������܌��F��ȫ�ķǾ����a�������c������������W�j���rIP���Ʋ��ԣ��������W�j���ԌW�������Y�����Σ���ֵ�������_�������x�ȃ��c���Mһ��������ϵ�y�Ŀ�ؓ�d�_��������
����һ�����O늙C�����@�M��ȫ���Q���ň��ؚ�϶���ҷֲ��r������ͬ��ֱ��늄әCģ�ͣ����Դ��Ч���͜u���p�ġ��ضȺ��l��׃����늙C������Ӱ�Ρ�����ʸ������ԭ�����ڶ�������ϵ��ͨ�^3��2׃�Q�������������(ia��ib��ic)�ֽ�������ă������(i����i��)�����D�Q���D������ϵ�еă����������(id��iq)��d��q����ϵ���Wģ�͞飺
늉����̣� 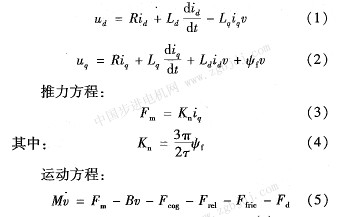 ʽ�У�x 1�����λ�ã�x 2������ٶȣ�u( t)���������w( t)��ϵ�y�н�IJ��_���Ըɔ_��  ��������ͬ��ֱ��늄әC�Ĕ��Wģ�ͺ�ʸ�����ƵĻ���ԭ��������simulink�h���½�����ֱ��늙C����ģ�͞錦���λ���ٶ��p�]�h����ϵ�y����D1��ʾ��λ�ú��ٶȭh��������PI����������ݔ�˞�λ�ýo��ֵ�͌��Hֵ���`�ݔ���ĽY�����ٶȽo�������ڲ����D�Ӵ�朶�����ƣ�i d=O���D�غ�����ķ�ֵ�����ȣ�����ٶ��{����ݔ�����H�������ֵ�Ľo��ֵ�������D�ӴŘOλ�Ùz�y�·��ݔ����̖���o����2��3׃�Q�õ��������������˲�r�o��ֵ���ٽ��^���h�����ۙ��FWM��׃����ݔ�����ཻ��늵�����ͬ��ֱ��늄әC�������@�M�У��a��������ԓ�p�]�h����ϵ�y�������£�λ�íhPI������K p=O��055��K i=20���ٶȭhP 1 |