�����ȅ^(q��)�^(gu��)�ɵ�����ͬ��늄�(d��ng)�C(j��)ֱ���D(zhu��n)�ؿ���
�ֺ�����(y��n)�l(w��i)������㑷壬�ǝ�
(�������I(y��)��W(xu��)���������710072)
ժҪ��������ֱ���D(zhu��n)�ؿ���(DTC)����ԭ����ᘌ�(du��)����ͬ��늄�(d��ng)�C(j��)ֱ���D(zhu��n)�ؿ���ϵ�y(t��ng)�ж��Ӵ�朽�(j��ng)�^(gu��)�������ȅ^(q��)߅��r(sh��)ϵ�y(t��ng)�D(zhu��n)���}��(d��ng)�^��Ć�(w��n)�}������ɷN�������ȅ^(q��)�^(gu��)�ɕr(sh��)�����D(zhu��n)���}��(d��ng)�ķ�����ƽ���ȅ^(q��)�^(gu��)�ɷ����^(gu��)�ȅ^(q��)�^(gu��)�ɷ�������(du��)������ăɷN�����M(j��n)���˷����о������挍(sh��)�(y��n)�Y(ji��)�������ɷN����������Ч�pСϵ�y(t��ng)�ж��Ӵ��̎���ȅ^(q��)߅��r(sh��)���D(zhu��n)���}��(d��ng)��
�P(gu��n)�I�~������ͬ��늄�(d��ng)�C(j��)��ֱ���D(zhu��n)�ؿ��ƣ��ȅ^(q��)�^(gu��)�ɣ��D(zhu��n)���}��(d��ng)
��Ȧ���(l��i)̖(h��o)��TM341 �īI(xi��n)��(bi��o)�R(sh��)�a��A ���¾�̖(h��o)��1004��7018(2008)05��0036��04
0����
�����(l��i)��ֱ���D(zhu��n)�ؿ���(���º�(ji��n)�QDTC)�������ڌ�(du��)늙C(j��)����(sh��)��ه��С�����ƺ�(ji��n)�Ρ��D(zhu��n)��푑�(y��ng)��̈́�(d��ng)�B(t��i)���ܺõȃ�(y��u)�c(di��n)�������ܵ���(gu��)��(n��i)�ⱊ���W(xu��)�ߺ͌�(zhu��n)�ҵ��P(gu��n)ע��DTC�đ�(y��ng)�Ì�(du��)��Ҳ������Į�������늙C(j��)��u���쵽����늙C(j��)��[1-2]���ڱ��ͬ�(l��i)��늙C(j��)�У�����ͬ��늄�(d��ng)�C(j��)���ڽY(ji��)��(g��u)��(ji��n)�Ρ��\(y��n)�пɿ���Ч�ʸߵȃ�(y��u)��(sh��)Խ��(l��i)Խ�ܵ��˂����P(gu��n)ע���ѽ�(j��ng)�ЌW(xu��)�ߌ�DTC�ɹ���(y��ng)��������ͬ��늄�(d��ng)�C(j��)[3-5]����늙C(j��)�����о��I(l��ng)����Ҳ�ɞ����о����c(di��n)֮һ��
�mȻDTC�����кܶ���(y��u)�c(di��n)�������y(t��ng)��DTC���g(sh��)��(y��ng)��������ͬ��늄�(d��ng)�C(j��)�У���Ȼ��һЩ��(w��n)�}��Ҫ��Q�����D(zhu��n)���}��(d��ng)��(w��n)�}���о���һ��(g��)���c(di��n)����Ҏ(gu��)��DTC����Bang-Bang�xɢ��ֵ�Ĝ��h(hu��n)���ƌ�(d��o)���D(zhu��n)���}��(d��ng)���ң���(gu��)��(n��i)��ܶ��W(xu��)�߶���������˺ܶ��[1-15]���īI(xi��n)[12]��ᘌ�(du��)���y(t��ng)��DTC���Ʋ����е�늉�ʸ���x���������a(b��)��߅���ϵ�늉�ʸ���x����������������pС����������ȅ^(q��)�ГQ�r(sh��)������D(zhu��n)���}��(d��ng)�������ڷ������y(t��ng)����ͬ��늄�(d��ng)�C(j��)ֱ���D(zhu��n)�ؿ�����Փ�Ļ��A(ch��)�ϣ��M(j��n)һ����(du��)ԓ�����M(j��n)��������̽ӑ���l(f��)�F(xi��n)ԓ������������Ч�pС����������ȅ^(q��)�ГQ�r(sh��)���D(zhu��n)���}��(d��ng)���ɴ�����˃ɷN�������ȅ^(q��)�ГQ�r(sh��)��Ч���ƴ���D(zhu��n)���}��(d��ng)�ķ������о��Y(ji��)��������������ăɷN���������_(d��)���A(y��)��Ŀ�ġ�
1 DTC����ԭ��
��Ҏ(gu��)DTC�У����������늴��D(zhu��n)��Te��
ʽ�У�P��O��(du��)��(sh��)��Ld��ֱ�S늸У�Lq�齻�S늸У��ؽǦĞ��D(zhu��n)�Ӵ�朦�f���c���Ӵ�朦�s�A�ǡ���(du��)���[�Oʽ����ͬ��늄�(d��ng)�C(j��)��Ld=Lq=Ls���t��
��ʽ(2)֪������(du��)������ͬ��늄�(d��ng)�C(j��)���D(zhu��n)�Ӵ�朷�ֵһ����ֵ�������Ӵ�朷�ֵ|��s|�����~��ֵ��늴��D(zhu��n)��Te������sin �ġ���ͨ�^(gu��)���ֶ��Ӵ�朷�ֵ�㶨����׃���Ӵ�����D(zhu��n)�ٶȺͷ���˲�r(sh��)�{(di��o)���D(zhu��n)�ؽǣ��Ɍ�(sh��)�F(xi��n)�D(zhu��n)�صĄ�(d��ng)�B(t��i)���ơ�
��(du��)���Ӵ�朵Ŀ��ƣ��ɵ�(gu��)�W(xu��)��M(j��n)��Depenbrok���ձ��W(xu��)��I Takahashi����Ķ��Ӵ��ģ�ͣ�
ʽ�У�is�鶨�������Vs�鶨��늉���Rs�鶨����衣���x늙C(j��)���ӳ�ʼ��朦�s0����(d��ng)���Զ������r(sh��)����ʽ(3)�����Ӵ�朦�s�ɱ�ʾ�飺
ʽ�У�i=l��2��3��4��5��6����ʽ(4)����֪�������Ӵ��?zh��n)�����s�Ķ��c(di��n)��������ʩ�ӵĿ��g늉�ʸ��Vs�ķ����\(y��n)��(d��ng)����s�ķ�ֵ���\(y��n)��(d��ng)������ٶȶ�����ͨ�^(gu��)�x����m�Ŀ��g늉�ʸ��Vs�{(di��o)��(ji��)��
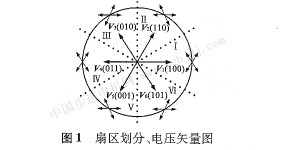
�D1�������月A�ȅ^(q��)���ּ���(du��)��(y��ng)�ȅ^(q��)늉�ʸ
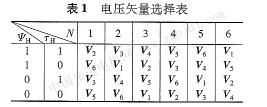
���x��D�����Դ_��늉�ʸ���x��������l��ʾ��
��1�У���H��TH�քe��ʾ��机��D(zhu��n)���h(hu��n)��������ݔ������(d��ng)��机��D(zhu��n)�صą���ֵ��s��Te�c��机��D(zhu��n)�صČ�(sh��)�Hֵ��s��Te�IJ�ֵ���ڜ��h(hu��n)���ȕr(sh��)�`���B(t��i)��l������Ҫ���Ӵ�朻��D(zhu��n)�أ���t��O������Ҫ�pС��朻��D(zhu��n)�ء�N������̎�ȅ^(q��)���ȅ^(q��)̖(h��o)��
2�ȅ^(q��)�^(gu��)��
��(du��)��Ҏ(gu��)����ͬ��늄�(d��ng)�C(j��)ֱ���D(zhu��n)�� |