�őҸ�����ϵ�y(t��ng)�Ġ�B(t��i)���g�O(sh��)Ӌ(j��)
��ɯ1���S�t��2
(1�����ڶ������W(xu��)Ժ��������h430205��2��h��W(xu��)��������h430079)
ժҪ����B�ˆ�늴��F�Ҹ�ϵ�y(t��ng)�Ą�(d��ng)�B(t��i)ģ�ͣ�����ԓ��(d��ng)�B(t��i)ģ�͞���A(ch��)�����à�B(t��i)���g���O(sh��)Ӌ(j��)����늉�����ݔ����������]�h(hu��n)�������������\(y��n)��Maflab�M(j��n)��������(y��ng)�ķ��档ԓ������(ji��n)�Ό�(sh��)�ã����ƅ���(sh��)�o(w��)�轛(j��ng)�(y��n)ԇ����ԇ�(y��n)�Y(ji��)��������ϵ�y(t��ng)����Ч�����ã���һ���Č�(sh��)�Ãr(ji��)ֵ��
�P(gu��n)�I�~���őҸ�ϵ�y(t��ng)���Ǿ�(xi��n)�ԣ���B(t��i)���g�����O�c(di��n)����
�ЈD���(l��i)̖(h��o)��TM301��2 �īI(xi��n)��(bi��o)�R(sh��)�a��A ���¾�̖(h��o)��1004��7018(2008)06��0010��03
�őҸ�ϵ�y(t��ng)��һ��(g��)��(f��)�s�ķǾ�(xi��n)��ϵ�y(t��ng)�����y(t��ng)��ϵ�y(t��ng)�����������û��ڂ��f����(sh��)ģ�͵��O(sh��)Ӌ(j��)��(��HD�O(sh��)Ӌ(j��)��[1,2])�����O(sh��)Ӌ(j��)�^(gu��)���У�����Ҫ���ƅ���(sh��)������Ҫ�{��(j��ng)�(y��n)ԇ��������B(t��i)���g�O(sh��)Ӌ(j��)����һ�(l��i)��ϵ�y(t��ng)��B(t��i)���gģ��(����B(t��i)���g��ʾʽ)����A(ch��)�ķ����O(sh��)Ӌ(j��)�����������ϲ���Ҫ�{��(j��ng)�(y��n)ԇ����
1�őҸ�ϵ�y(t��ng)�Ġ�B(t��i)����
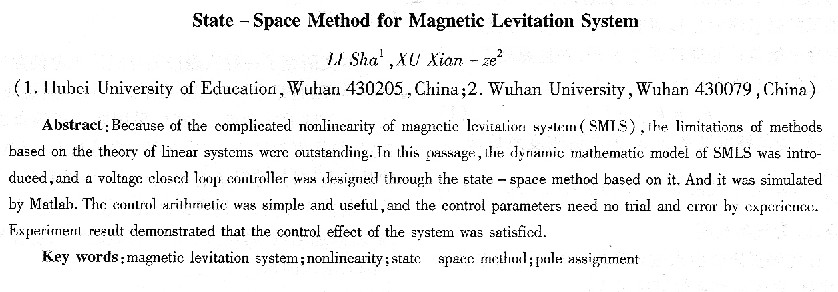
�őҸ�ϵ�y(t��ng)һ���ɶ���(g��)늴��F�M�ɣ�������ÿ��(g��)늴��F�Ą�(d��ng)�B(t��i)ģ��һ������ͬ�ġ��D1���(g��)�
���F�c���ٌ�(d��o)܉�M�ɵđҸ�ϵ�y(t��ng)����ԭ��D���D�У�mg��늴��F����,fd�����_��(d��ng)����F(xi��n)(i��t)��늴�������z(t)��ŘO��������(du��)����ƽ��ľ��x��h(t)�錧(d��o)܉��������(du��)����ƽ��ľ��x��c(t)��ŘO�c��(d��o)܉��(w��n)�Ě�϶��i(t)����ƾ�(xi��n)Ȧ�����u(t)���@�M��·��늉���
ȡ��������?y��n)��������x��(��c����c����i)T�����B(t��i)׃��������(du��)ϵ�y(t��ng)�M(j��n)��ƽ���c(di��n)(i����c��)������(xi��n)�Ի�̎�����ɵ�����?t��ng)�B(t��i)����(�����F�ĺ͌�(d��o)܉�еĴ����Լ��@�M©��ͨ)��
�F�ŘO��e��N��늴��F��(xi��n)Ȧ�є�(sh��)��
��Ҋ(ji��n)����ϵ�y(t��ng)��һ��(g��)���A�_(k��i)�h(hu��n)ϵ�y(t��ng)��ͨ�^(gu��)��˹(Rol-th)�Г�(j��)��֪�������в���(w��n)���ԡ���ˣ����˱��C늴��F�܉�(w��n)���Ҹ�����Ҫ�o�@��(g��)ϵ�y(t��ng)��һ��(g��)�������ơ�
2��B(t��i)���g�O(sh��)Ӌ(j��)��
��B(t��i)���g�O(sh��)Ӌ(j��)����ͨ�^(gu��)��B(t��i)��������ϵ�y(t��ng)��B(t��i)�О��(l��i)��(sh��)�F(xi��n)����Ŀ��(bi��o)�ġ��������c(di��n)��ϵ�y(t��ng)�ă�(n��i)�����Ժ�ϵ�y(t��ng)��B(t��i)���О顣���O(sh��)Ӌ(j��)�΄�(w��)�Ǵ_������Ŀ��(bi��o)�����Ɍ�(sh��)�F(xi��n)����Ŀ��(bi��o)�Ġ�B(t��i)����������[3]�����ô��O(sh��)Ӌ(j��)��������һ��(g��)ǰ�ᣬ��ϵ�y(t��ng)��횾����ܿ��Ժ����^(gu��n)�ԡ�
2��1ϵ�y(t��ng)���ܿ��Ժ����^(gu��n)��
ϵ�y(t��ng)���ܿ��Ժ����^(gu��n)�Զ���ϵ�y(t��ng)��һ�N��(n��i)�����ԣ��քe��ӳϵ�y(t��ng)�������ú�ݔ�����cϵ�y(t��ng)��B(t��i)֮�g�������P(gu��n)ϵ������������ϵ�y(t��ng)�����Y(ji��)��(g��u)�ͅ���(sh��)���Q���ġ�����ʽ(1)�е�܉����׃��h(t)�̈́�(d��ng)�B(t��i)�ɔ_fd(t)���ɵ�ԓ���̵�ϵ��(sh��)���:
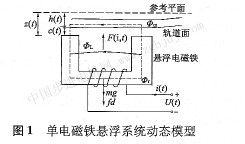
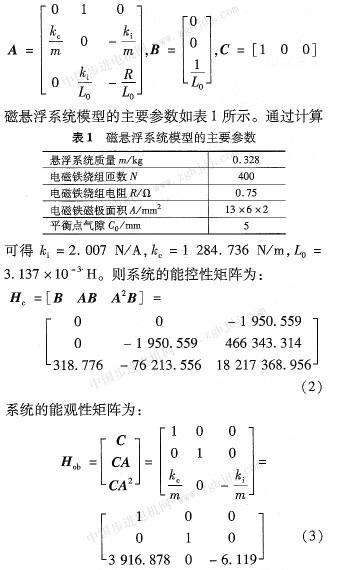
ͨ�^(gu��)ʽ(2)��ʽ(3)��֪��ϵ�y(t��ng)���ܿ�ꇺ����^(gu��n)ꇵ��Ⱦ���3����ϵ�y(t��ng)�ȿɿ��ֿ��^(gu��n)��
2��2ϵ�y(t��ng)�ĘO�c(di��n)����
��Ȼϵ�y(t��ng)����ȫ�ܿصģ��t����ϵ�y(t��ng)���]�h(hu��n)�O�c(di��n)������ʹ��ԭ��(l��i)����(w��n)�����ܿ،�(du��)��׃?y��u)��]�h(hu��n)��(w��n)������ʽ(1)��֪����늉���ݔ����ƵĴőҸ���(xi��n)�Ի�ϵ�y(t��ng)��һ��(g��)���Aϵ�y(t��ng) [4]�������x��һ��(du��)����(d��o)�O�c(di��n)�飺  ʽ�У��ƺͦ�n�քe�Ƕ��Aϵ�y(t��ng)������ϵ��(sh��)�͟o(w��)����������l�ʡ�����һ��(g��)�O�c(di��n)��������(d��o)�O�c(di��n)��߅�^�h(yu��n)�ĵط���ʹ��ԓ�O�c(di��n)��(du��)�]�h(hu��n)ϵ�y(t��ng)�Ą�(d��ng)�B(t��i)����Ӱ푺�С���@�ӾͿ���ϵ�y(t��ng)������ֻ������(d��o)�O�c(di��n)�Ķ��Aϵ�y(t��ng)��
�O(sh��)�]�h(hu��n)ϵ�y(t��ng)�M(m��n)������(d��ng)�B(t��i)ָ��(bi��o)��ݔ�����{(di��o)���ҡܰٷ�֮2.O���{(di��o)���r(sh��)�gts��O.10s�����Aģ�͵ij��{(di��o)�����{(di��o)���r(sh��)�g����Ӌ(j��)�㹫ʽ��
ȡ��=0.80����n=52������ʽ(4)�ɵ�����(d��o)�O�c(di��n)���l,2=-41.6��j31��2�����x��O�c(di��n)��3����ʮ���h(yu��n)������3=-500���tϵ�y(t��ng)�������]�h(hu��n)�������(xi��ng)ʽ�飺
3ϵ�y(t��ng)���������O(sh��)Ӌ(j��)�c����
�����B(t��i)���������ɣ�
|