��(j��ng)�W(w��ng)�j(lu��)��ģ�����ڲ�(li��n)�C(j��)�����еđ�(y��ng)��
���ڣ��߇�(gu��)�٣��̼o(j��)�Q
(���K��W(xu��)�����K�(zh��n)��212013)
ժҪ�������û�ģ���Ʋ��Ԍ�(du��)���،�(du��)���M(j��n)�п��Ʒ��棬�ڷ����Y(ji��)���Y(ji��)����(j��ng)�W(w��ng)�j(lu��)��ģ���Ʒ��������������(j��ng)�W(w��ng)�j(lu��)��ģ���ƵČW(xu��)��(x��)������(qi��ng)�����m��(y��ng)���R(sh��)������(qi��ng)�����ԟo(w��)�F�ƽ����⺯��(sh��)�ă�(y��u)�c(di��n)������Y(ji��)����������(j��ng)�W(w��ng)�j(lu��)��ģ���Ʒ����ĸ�ۙЧ���ã�ϵ�y(t��ng)�`��С�����ԝM��C(j��)���˿��Ƶ�Ҫ���܉��Q�C(j��)���˵�܉�E��ۙ��(w��n)�}�����挍(sh��)�(y��n)�C��(sh��)��ԓ���Ʋ��Ե����_�Ժ���Ч�ԡ�
�P(gu��n)�I�~����(li��n)�C(j��)���ˣ���ģ���ƣ���(j��ng)�W(w��ng)�j(lu��)�����棻���Ʋ���
�ЈD���̖(h��o)��TP273+��3 �īI(xi��n)��(bi��o)�R(sh��)�a��A ���¾�̖(h��o)��1004��7018(2008)08��0032��04
0����
��(li��n)�C(j��)���˾��и߾��ȡ����ȴ��d����(qi��ng)���\(y��n)��(d��ng)�T��С��λ���`��e�۵����c(di��n)���c��(li��n)�C(j��)���˳ʻ��a(b��)�P(gu��n)ϵ���ɞ�C(j��)�����о��I(l��ng)��ğ��c(di��n)��
�������D�о�һ�N���Ʋ��ԣ���(l��i)�M�㲢(li��n)�C(j��)��(g��u)�ĸ��ٶȡ��߾��ȵĿ���Ҫ��(li��n)�C(j��)���˱�����һ��(g��)�߶ȷǾ���ϵ�y(t��ng)���\(y��n)��(d��ng)�^(gu��)���д������ܴ�ĸɔ_���أ���Ҏ(gu��)�Ŀ��Ʋ����ѽ�(j��ng)���y�M�����Ҫ��׃�Y(ji��)��(g��u)����ϵ�y(t��ng)�ڙC(j��)���ˡ����պ�����I(y��)�I(l��ng)�������������đ�(y��ng)���о�����?y��n)�C(j��)���˄�(d��ng)���W(xu��)һ���ǷǾ��Ԅ�(d��ng)���W(xu��)��ͬ�r(sh��)���ڶ�N�����A(y��)Ҋ(ji��n)���ⲿ�ɔ_�����ԙC(j��)���˿����ǽ����(l��i)׃�Y(ji��)��(g��u)����ϵ�y(t��ng)��Փ����Ҫ��(y��ng)�íh(hu��n)��֮һ�����Ƕ���(w��n)�}һֱ��׃�Y(ji��)��(g��u)���Ƶğ��c(di��n)����������ķ����кܶ࣬��������څ���ʷ�����(du��)֧·�M(j��n)�з��棬Ȼ���û�ģ���Ƶ�Ч���ƌ�(du��)ϵ�y(t��ng)���棬���ڻ�ģ���ƵĶ����С��Ҫ��������������ГQ����Q���ģ���������һ�N���͵Ľ�Q������Ʒ�����������(j��ng)�W(w��ng)�j(lu��)��(du��)�ГQ�(xi��ng)�������M(j��n)���{(di��o)��(ji��)���Ķ��ĸ����Ͻ����˻�ģ���ƵĶ���
1֧·ģ��
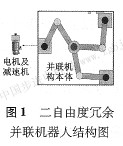
�����о��IJ�(li��n)�C(j��)�����Ƕ����ɶ��(q��)��(d��ng)���ಢ(li��n)�C(j��)����[6]������������(g��)�(q��)��(d��ng)���֣�ÿ��(g��)�(q��)��(d��ng)��(c��)����һ��(g��)����MINAs Aϵ��Ac�ŷ�늙C(j��)�͜p���b�á���λ�C(j��)ͨ�^(gu��)�̸߿��ƿ�GT-400-sV��(l��i)��������(g��)늙C(j��)���@�N�C(j��)��(g��u)���(q��)��(d��ng)Ԫ�p�٣��Y(ji��)��(g��u)�o�������ЏV���Č�(sh��)�Ãr(ji��)ֵ���о�?j��)r(ji��)ֵ���ڹ��I(y��)�о��ЏV���đ�(y��ng)�á���D1��ʾ��
2�����ŷ��(q��)��(d��ng)֧·ģ��
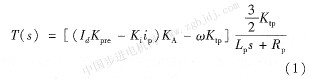
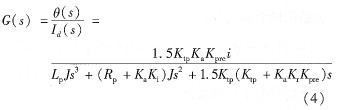
�����еĿ���늙C(j��)�����½����ŷ�늙C(j��)������(j��)���P(gu��n)�īI(xi��n)[7,8]��֪��������Ƶ����������B�ӵğo(w��)ˢ�����ŷ�늙C(j��)��ݔ���D(zhu��n)�ؿ��Ա�ʾ�飺
ʽ��Kpre�������̖(h��o)ǰ�÷Ŵ�ϵ��(sh��)88��Ki������h(hu��n)����ϵ��(sh��)2.2��KA������{(di��o)��(ji��)���Ŵ�ϵ��(sh��)6��Lp��Rp�����@�M��늸к���裬�քe��9��9 mH��3 7����Id�քe�������@�M�������Kr���ٶȷ���ϵ��(sh��)��i��p�ٱȞ�0.025��Ktp���D(zhu��n)�س���(sh��)��0��67 N��m��A��������:
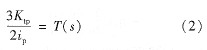
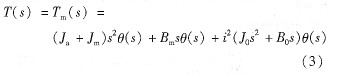
���⣬�cֱ��늙C(j��)ؓ(f��)�d�S�ķ�����ƣ��ڲ����]��Ч�ɔ_�ėl�����(q��)��(d��ng)�S�ϵ��D(zhu��n)��ƽ�ⷽ�̞飺
(li��n)��ʽ(1)��ʽ(3)�����Եõ����Ե�Ч�ɔ_���ؗl���µĂ��f����(sh��)��
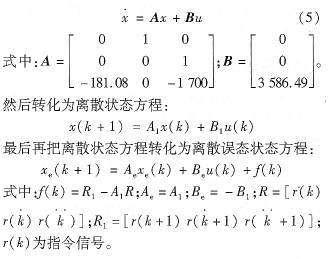
���˔�(sh��)��(j��)���õ��Ă��f����(sh��)Ȼ���D(zhu��n)�����B(t��i)���g����[1-2]�飺
3�������O(sh��)Ӌ(j��)
3.l��ģ׃�Y(ji��)��(g��u)����˼·[4]
��ģ׃�Y(ji��)��(g��u)(Vss)������һ�N��Ч�Ŀ��Ʒ�����һ��ɵõ����B�m(x��)�Ŀ����ɡ�VSS����Ҫ��(y��u)�c(di��n)����ϵ�y(t��ng)���A�������O(sh��)Ӌ(j��)�����ɔ_����(du��)����(sh��)׃�������еď�(qi��ng)�����ԣ��Լ����ײ��Ä�(d��ng)��������(sh��)ʩ��Ȼ���O(sh��)Ӌ(j��)Vss�ăɂ�(g��)�����y�Ǵ_���(q��)ʹϵ�y(t��ng)����ģ�Ŀ��ƣ��Լ��pС̎�ڻ���(d��ng)�B(t��i)�r(sh��)�ć��@�ГQ��Ķ���(w��n)�}�����ɲ��_���ԵĽ���Ӌ(j��)�����(l��i)�Ĺ̶��������棬��������̫С���tڅ���ٶȺ�С���෴����s�^�t���_(d��)��ģ�r(sh��)����Ķ����^���x����ָ��(sh��)څ���ɣ�
|