����CPLD��(sh��)�ؙC(j��)���ļӜp�ٿ���
��÷�������o���Ώ�
(��(n��i)�ɹſƼ���W(xu��)����(n��i)�ɹŰ��^014010)
ժҪ�����p�S���SӲ��ֱ�����a(b��)�㷨�Ļ��A(ch��)�ϣ�����˲�ͬ�ڳ��õ��p�S���S늙C(j��)ͬ�r(sh��)�Ӝp�ٵĿ��Ʒ���������CPLD����Ӳ���O(sh��)Ӌ(j��)����(sh��)�F(xi��n)���p�S�Ӝp�ٿ���������(j��ng)�^�h(hu��n)�η��������Ŵ��·���ƶ��S(X��Y��)���M(j��n)늙C(j��)����(sh��)�F(xi��n)�C(j��)�����ټӹ����Ӻ�ֹͣ�r(sh��)�ٶȵķ�(w��n)���^�ɡ�����Y(ji��)���@ʾ����Ч�����ã��(y��n)�C��ԓ�����㷨����Ч�ԡ�
�P(gu��n)�I�~�����M(j��n)늄әC(j��)���Ӝp��ֱ�����a(b��)���p�S(li��n)�ӣ�CPLD
�ЈD���̖��TM383��6 �īI(xi��n)��(bi��o)�R�a��A ���¾�̖��1004��7018(2008)08��0045��04
0����
�Ӝp�ٿ����ǔ�(sh��)��ϵ�y(t��ng)��ʮ����Ҫ�Ŀ��ƹ��ܣ�����ϵ�y(t��ng)�ľ��Ⱥ���������Ҫ��Ӱ푣��ڸ��ټӹ��У��Ӝp�ٿ����@���Ȟ���Ҫ����ˣ��о���Ч���߾��ȵļӜp�ٿ����㷨�������_�l(f��)�����ܵ�Ӌ(j��)��C(j��)��(sh��)��ϵ�y(t��ng)����ʮ����Ҫ�����x��
�������īI(xi��n)[2]����B�IJ��M(j��n)늄әC(j��)�(q��)�Ӕ�(sh��)��ϵ�y(t��ng)���p�S(li��n)��Ӳ��ֱ�����a(b��)�㷨�Ļ��A(ch��)�ϣ��鱣�C�C(j��)���ڼӹ��r(sh��)���ӻ�ֹͣ���a(ch��n)���_����ʧ�������̻���ʎ�������M(j��n)늄әC(j��)���M(j��n)�o�}�_�l���M(j��n)�мӜp�ٿ��ơ����y(t��ng)�ļӜp�ٿ��Ʒ�ʽ�Ԇ��S���a(b��)�㷨����A(ch��)����ͬһ�r(sh��)��ֻ�܌��η���늄әC(j��)�M(j��n)�п��ƣ���˷��@һ��ʽ�����ڵČ�(sh��)�F(xi��n)�ٶ�����ռ�C(j��)�r(sh��)�g�L�Ȳ��㣬����p�S(li��n)�ӼӜp�ٿ��Ʒ�ʽ��������CPLD��Ӳ�����o�����M(j��n)늄әC(j��)�Ӝp�ٿ����㷨���O(sh��)Ӌ(j��)�͌�(sh��)�F(xi��n)������
1ϵ�y(t��ng)��(g��u)��
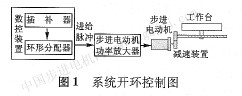
���_�h(hu��n)���ƵĔ�(sh��)�ؙC(j��)��ϵ�y(t��ng)�У���(sh��)���b��ݔ?sh��)ij��}�_��(j��ng)�^�h(hu��n)�η���������ͨ�^�(q��)���·�M(j��n)�й��ʷŴ���K���Ʋ��M(j��n)늄әC(j��)�Ľ�λ�ơ����M(j��n)늄әC(j��)�ڽ�(j��ng)�^�p���b�Î����˽z�܌���λ���D(zhu��n)�Q���ƄӲ�����ֱ��λ�ƣ���D1��ʾ�����S��(sh��)�ؙC(j��)��ʯ���\(y��n)���Գ����M(j��n)늄әC(j��)�����(q��)��Դ��y���\(y��n)����y���M(j��n)늄әC(j��)�����(q��)��Դ������x���y���M(j��n)늄әC(j��)�\(y��n)�ӵĽM�ϣ��M(j��n)�����Ƶ����ڹ����_�ϵĶ��S�\(y��n)��[1]��
2�p�S(li��n)�Ӳ��a(b��)�Ӝp�ٿ��Ʋ���
�Բ��M(j��n)늄әC(j��)���(q��)�ӵ��_�h(hu��n)��(sh��)�ؙC(j��)��������λ�Þ��_�h(hu��n)�������^�̵ľ��_�Ⱥܴ�̶���ȡ�Q��ָ���}�_��̖����ˣ����a(b��)�㷨�ɞ锵(sh��)�ֿ��Ƶĺ��ă�(n��i)�ݣ�ֱ�����a(b��)�㷨�ĺÉ��c��(sh��)�ؼӹ��Ϳ���ԭ��������ٶȺ;�����ֱ�ӵ��P(gu��n)ϵ���������īI(xi��n)[2]����B��Ӳ��ֱ�����a(b��)�Ļ��A(ch��)�ϣ�ͨ�^���A�θ�׃�M(j��n)�o�}�_���l�ʁ����Ʋ��M(j��n)늄әC(j��)�Ľ�λ���ٶȣ��M(j��n)����׃�ƄӲ�����ֱ��λ���ٶȣ���(sh��)�F(xi��n)�Ӝp���c����֮�g��ƽ��(w��n)�D(zhu��n)�Q��ͬ�r(sh��)��ͨ�^�����l�ʔ�(sh��)����λ������
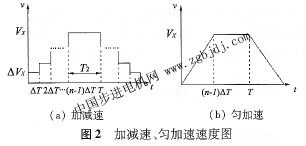
�ٶ�׃���^����D2a��ʾ���M�S��r(sh��)�g���v�S���ٶȡ��S���r(sh��)�g��׃�����ٶȳ��_�Aʽ�����L�����L��****�ٶȺ�����\(y��n)��һ�Εr(sh��)�g������Ҫ�Y(ji��)���ӹ��r(sh��)���ٶȳ��_�Aʽ���f�p������(j��)��ͬ�ӹ���ˇ��Ҫ��_���ٶȵ��A�S�����r(sh��)�g��ͬ�r(sh��)�M�������c(di��n)��
(1)�Ӝp���\(y��n)���A�Σ��ٶȕr(sh��)�g�������A�����۾��M�τ����б��(��D2��ʾ)��
(2)�����Ч�ʣ��Ӝp���^��Խ��Խ�ã�����ÿ���ٶ��A�S��׃�����������Sֵ��ԭ�t����������ʧ���͛_����ʎ��
(3)���ٺ͜p���^�̞錦�Q�ġ�
(4)��ͬһ�������ԼӜp�ٷ�ʽ�\(y��n)�ӕr(sh��)�C(j��)���ƄӲ�����ֱ��λ�ƣ���(y��ng)�c�Ԅ��ٷ�ʽ�\(y��n)�ӕr(sh��)����ͬ�����D2a�ĈD����e�c�D3����ȣ��M��ʽ(4)��ʹ�ÙC(j��)���\(y��n)�Ӳ�ʧ���������̡�
��5��X���cY���ÿһ�����ٻ�p���A�΅f(xi��)�{(di��o)�����\(y��n)�У���ÿһ��X���Y��늙C(j��)����ʼ�K����ͬ�r(sh��)�߲�ͬ�r(sh��)�D(zhu��n)�Q�ٶȣ����A�κϳ��\(y��n)�ӷ��ֲ�׃�cֱ������һ�¡�
3 �Ӝp�ٲ��a(b��)�㷨����(sh��)�F(xi��n)
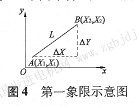
����������Ķ��Sֱ��AB����(��D4���)���f��ֱ�����a(b��)�㷨�����c(di��n)4����(bi��o)��(X1��Y1)���K�c(di��n)B��(ji��n)��(bi��o)��(X2��Y2)��ֱ��AB��ˮƽ������X=|X2-X1|����ֱ������y=|Y2-Y1|��
(1)�p�S(li��n)�ӄ���ֱ�����a(b��)[2]
|