�õ�����С���˷����R(sh��)����늄�(d��ng)�C(j��)©��
��t÷�����ҽ�
���Ϸʹ��I(y��)��W(xu��)������ �Ϸ� 230009��
ժҪ������˵�����С���ˌ���(y��u)�����R(sh��)����늄�(d��ng)�C(j��)©���Ĕ�(sh��)�W(xu��)ģ�ͣ�����matlab�Z(y��)�Ծ���(xi��)��ͨ��Ӌ(j��)���������\�ͮ���늄�(d��ng)�C(j��)t�͵�Ч�·�еĶ����D(zhu��n)��©����ԓ���������^�ߵ�Ӌ(j��)�㾫�ȡ�Ӌ(j��)��r(sh��)�g�̼������D(zhu��n)��©��
��ֵ��׃����(du��)�㷨����Ӱ푲�������c(di��n)��
�P(gu��n)�I�~��������С���˷�������늄�(d��ng)�C(j��)��©�����㷨����
�ЈD���(l��i)̖(h��o)��tm343 �īI(xi��n)��(bi��o)�R(sh��)�a��a ���¾�̖(h��o)��1001-6848(2000)04-0016-03
1 �� ��
������יC(j��)����ͨ�^(gu��)���d��(sh��)�(y��n)�Ͷ�·�����D(zhu��n)����(sh��)�(y��n)��(l��i)�y(c��)���䅢��(sh��)������Ҫ�Ѷ����D(zhu��n)��©�����_(k��i)��ʮ�����y�ģ��������O(sh��)�����ۺ�ֵ��ȡ��S��늄�(d��ng)�C(j��)�{(di��o)�ٺͿ���ϵ�y(t��ng)�İl(f��)չ����(du��)����늙C(j��)�ą���(sh��)�������Ҫ��������Ҫ��(sh��)�y(c��)�Ü�(zh��n)������Ҫ���ό�(sh��)�H�\(y��n)����r��������ö��D(zhu��n)��(sh��)�(y��n)��ȡ����늄�(d��ng)�C(j��)��©�������y�M(m��n)�����ϵ�y(t��ng)�ľ���Ҫ��
��(gu��)��(n��i)����һЩ�W(xu��)�߰l(f��)���^(gu��)����С���˷����R(sh��)����늄�(d��ng)�C(j��)����(sh��)��Փ�ģ��ڿ��d��(sh��)�(y��n)�Ͷ�·��(sh��)�(y��n)�Ļ��A(ch��)�ϣ���ͨ�^(gu��)ֱ��˥�p����(sh��)�(y��n)�@ȡһ�M��ʼ��(sh��)��(j��)���üә�(qu��n)��С���˷����㮐��늄�(d��ng)�C(j��)�����D(zhu��n)��©��[1]��ԓ�����Ƿ��Մ��c����(sh��)��ʼֵ���������Ӽ����������P(gu��n)��������(sh��)��ʼֵ���������Ӽ������ꇵ��x�����ԇ̽����{��(j��ng)�(y��n)�Q����Ӌ(j��)��dz��M(f��i)�r(sh��)���o��(sh��)�H�Ĺ����\(y��n)�㎧��(l��i)���㡣��������˵�����С���ˌ���(y��u)�����R(sh��)����늄�(d��ng)�C(j��)©���Ĕ�(sh��)�W(xu��)ģ�ͣ�����matlab�Z(y��)�Ծ���(xi��)��ͨ��Ӌ(j��)������ڿ��d�Ͷ�·��(sh��)�(y��n)�Ļ��A(ch��)�ϣ���ͨ�^(gu��)���l�®���늄�(d��ng)�C(j��)�ڲ�ͬ�D(zhu��n)���µĹ������Ԍ�(sh��)�(y��n)�@ȡһ�M��֪��(sh��)��(j��)��������\�ͮ���늄�(d��ng)�C(j��)t�͵�Ч�·�е�©�����^��(zh��n)�_�ر��R(sh��)������늄�(d��ng)�C(j��)�Ķ����D(zhu��n)��©��ֵ�����⣬�����D(zhu��n)��©����ֵ�xȡ�^�ף�����ֱ���x�����D(zhu��n)��©����ֵ(x�Ƕ�·늿�)��ͬ�r(sh��)���^�˳�ֵ׃����(du��)�㷨���ȵ�Ӱ푣��l(f��)�F(xi��n)��ֵ׃����(du��)�㷨����Ӱ푲���
2 ������С���˷����R(sh��)����늄�(d��ng)�C(j��)©���Ĕ�(sh��)�W(xu��)ģ��
�ɿ��d�Ͷ��D(zhu��n)��(sh��)�(y��n)�ɶ����Ă�(g��)����(sh��)���������ri���D(zhu��n)�����rz(���ۺ�)���������r����늿�x��������t�͵�ֵ�·����ö�����ˌ�(d��o)�{�飺
�ɶ����˶�늉���������ʱ����D(zhu��n)�ٱ����x��(sh��)����ֱ�������(du��)��(y��ng)ÿһ��(g��)�D(zhu��n)����5�Č�(d��o)�{���ٶ����@��Ҏ(gu��)�M��(sh��)��(j��)�����ǰ������M�ϵ���С���˹�Ӌ(j��)
�`�����Ҏ(gu��)����(w��n)�}��Ŀ��(bi��o)����(sh��)�飺
��(du��)��ʽ(2)�@�ӵķǾ���Ҏ(gu��)����(w��n)�}������Ҫ����һ�M׃��x1��x2��ʹ��(3)ʽ������
���Ì�(du��)ʽ(3)��(d��o)��(sh��)�ķ���ȡ�ØOֵ�c(di��n)zf��zf�����
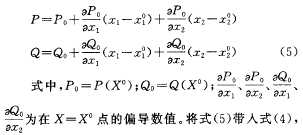
�s����(sh��)��(li��n)��ʽ(4)����xf��һ�����y�ȡ���ʽ(1)����һ�����D(zhu��n)����s�£���(d��o)�{�Č�(sh��)��p��̓��qֻ��׃��x=[xl��x2]t�ĺ���(sh��)���ʌ�p��q�ڽ��ƘOֵ�c(di��n)xo=[x1��z!]t����չ��̩�ռ�(j��)��(sh��)����ȡ��ǰ3�(xi��ng)��ã�
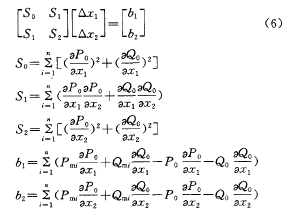
��x=xo�c(di��n)��ƫ��(d��o)��(sh��)ֵ����ʽ(5)����ʽ(4)���ó��õ�����С���˷����R(sh��)����늄�(d��ng)�C(j��)©���Ĕ�(sh��)�W(xu��)ģ�͞飺
���ʽ(6)���Է��̽M�ɵõ�  ��һ�εĵ�����ʼֵ�飺  |