�����ŷ�늙C���������Ƽ��g(sh��)
ꐜY�1���� ��1���� ��2
(1���A��������W(xu��)���V�| �V�� 510640��2�����������W(xu��)�����)
ժ Ҫ���ŷ�늙C�������������܌������M�\�ӿ���ϵ�y(t��ng)�����P(gu��n)��Ҫ�ġ����нo���������ŷ�늙C��ģ�ͣ��քe��B�ˎN����������Փ���ŷ�늙C�еđ�(y��ng)�ã��������ڌ��F(xi��n)�@Щ���M�����㷨�Ĕ�(sh��)����̖̎����(dsp)Ҳ���ˏ��{(di��o)�f��������������˿��Y(ji��)��
�P(gu��n)�I�~�������ŷ�늙C���������Ƽ��g(sh��)����(sh��)����̖̎����
�ЈD���̖��tm383.4��tm921.5 �īI���R�a��a ���¾�̖��1001- 6848 (2000) 05 - 0021- 04
1 �� ��
�ŷ�늙C���������������ֱ��Ӱ푵��������ӿ���ϵ�y(t��ng)�ı��F(xi��n)��Ŀǰһ��������şoˢ늙C�����ŷ�늙C�������c�������F�ɹ�(ji��)ʡ��������Դ���������д���늙C��Ч�ʸ������@����(j��)��Ӌ������늙C�ēp�IJ��{ͬ���w�e�ĸБ�(y��ng)늙C�p�ĵİٷ�֮60[1]����������늙C�Ě�϶�������ñȸБ�(y��ng)늙C�Ĵ�ö࣬���늙C�������������ף��书����(sh��)�ԱȸБ�(y��ng)늙C�ĸߡ����oˢ늙C�t����Ҫ�ˢ�͓Q�������������ˢ���µİl(f��)�ᆖ�}�����Ƴ�ȫ�ܷ���ʽ����S�o�����ڐ��ӵĭh(hu��n)�����\�С��D(zhu��n)�ӑT��С�����кܺõļ������ܡ����Ž����oˢ늙C���ڵ���������ƽ���\�ж����D(zhu��n)���}�Ӳ����У����m�����ŷ�늙C[2]��
��ǰ���ŷ�늙Cһ�����ֱ���oˢ늙C������P(gu��n)��ֱ��늙C����Փ�ѽ�(j��ng)�dz����죬ͬ�rҲ�����������ڮ�(d��ng)�r����Ӻ������������l(f��)չˮƽ��Ȼ���@�ӵ�늙C����Ͱ��b��Ҫ�Ƚ����oˢ늙C��(f��)�s�����y�Կ˷������µļy���D(zhu��n)�ء��S����Ӻ������Ӽ��g(sh��)��Ѹ�ٰl(f��)չ������ٔ�(sh��)����̖̎����(dsp)��mosfet���^�����p�O�;��w��(igbt)���߉������·(hvic,)�ȵij��F(xi��n)���Լ��F(xi��n)��������Փ�����ڸ���������Խ��Խ��ؑ�(y��ng)���ڌ��`�����Ž����oˢ늙C����ȡ��ֱ��늙C���ɞ��ŷ�늙C��������
���Ľ�B�������Ƽ��g(sh��)���ŷ�늙C�еđ�(y��ng)�á��V�x���f���������Ƽ���ʹϵ�y(t��ng)���ⲿ�_�Ӻͅ���(sh��)׃�������У���Ҫ�����m��(y��ng)���ơ���ģ׃�Y(ji��)��(g��u)���ơ�hһ��h����(y��u)�����ơ��������V��(kf)�ȡ��@Щ������Փ�����^���죬��������(y��ng)���ڌ��`�ĕr�g�����L����Ҫ�������@Щ�������^�鷱�s������ǰ��Ӳ���팍�F(xi��n)�y���_�����r��Ҫ��(sh��)����̖̎����(dsp)�ij��F(xi��n)�����Hʹ�@Щ���}ӭ�ж��⣬����߀�܉�?q��)��F(xi��n)�������r��Ч�ķ�������o���������Ƶȡ�
2 늙Cģ��
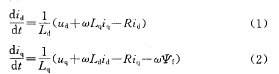
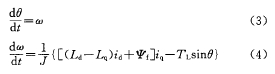
����(j��)�·ԭ����늙C�y(t��ng)һԭ�����κ�늙C��(j��ng)�^�m��(d��ng)?sh��)�����׃�Q�����Ԍ��ɽy(t��ng)һ�ķ���ʽ�������ŷ�늙C���c�D(zhu��n)��ͬ�����D(zhu��n)��d-q����ϵ�µ�ģ�ͿɌ��飺
������(j��)ϵ�y(t��ng)�Ġ�B(t��i)�x��ɂ�����ݔ������֮һ���ஔ(d��ng)��ϵ�y(t��ng)�ЃɷN�Y(ji��)��(g��u)����
�������̌���������Ą�ŷ���za���D(zhu��n)�ط���i�������_�����քe�������M�п��ƣ��Ķ����F(xi��n)�˽�������ϵ�y(t��ng)��ʸ�����ƣ��õ����cֱ��늙C���������ܡ��������ʽ�Ӻ�������ϵ�y(t��ng)�ľ����ʽ�Ġ�B(t��i)���̣������_��헻�ɔ_�Ҳ�����Mȥ���@�ﲻ��٘����
3 ���m��(y��ng)����
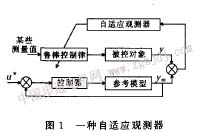
���m��(y��ng)���Ƶ��о�������Դ��50��������������w�����Ԅ��{�x���O(sh��)Ӌ[3]������ں��պ��졢�������Vɽ�����ϵ�y(t��ng)���I(l��ng)�õ��ˏV���đ�(y��ng)�á�����Ҫ�ЃɷN��ͣ���ģ�ͅ������m��(y��ng)ϵ�y(t��ng)(mras)����У���{(di��o)��(ji��)��(str)������֮�g���]�����@�Ľ��ޡ������˼���Ǹ���(j��)ϵ�y(t��ng)�ӑB(t��i)�͔_�Ӂ�
���r���{(di��o)��(ji��)����������(sh��)�������O(sh��)Ӌ���������@Щ����Ҫ�������\�㣬���H��(y��ng)�Õr�ɸ�����Ҫ�m��(d��ng)ȡ�ᡣ
���m��(y��ng)���Ƶ�˼��������^�yϵ�y(t��ng)�Ĕ_�ӻ_���ԣ���(g��u)�����m��(y��ng)�^�y������Ӌ�����_��헵� |