��ʽ�oˢ�p��늙C���ķN�ӑB���Wģ��
�ߏ����n�������x���~�ʽܣ��_�o��
(�ؑc��W���ؑc400044)
ժҪ�����ý���늙Cһ����Փ��늙C��ꇷ����������ļ�ʽ�oˢ�p��늙C�Ļ����Y����늴��Pϵ���l���քe�������ķN��ͬ�ĄӑB���Wģ�͡��������oֹ����ϵ���Wģ�͡������ٶȃ������D����ϵ���Wģ�͡��D���ٶȃ������D����ϵ���Wģ�͡��pͬ���ٶȃ������D����ϵ���Wģ�ͣ������������Ե����c�M���˷������Խ������D���ٶȃ������D����ϵ���Wģ�͞�������ԓ늙C�M���˷��挍�Ķ���C��ģ�͵����_�ԣ���ԓ�늙C�����Է���������Ʋ����о��춨�ˏ�Փ���A��
o�� ��
�oˢ�p��늙C���F�˟oˢ��������׃�l������С����ͬ�r���Ю���늙C��ͬ��늙C�����c������ڽ���׃�l�{���I��ͽ������׃�ٺ��l�l��I����ЏV韵đ���ǰ����
�oˢ�p��늙C�֞���F��ʽ�oˢ�p��늙C�ͼ�ʽ�oˢ�p��늙C(���º��Qcbdfm)��Ŀǰ�����⌦���F��ʽ���о��^�࣬������ʽ���о��^�٣��īI[8]��cbdfm�Ļ�������ԭ���M�����о����īI[9]��cbdfm��d��q���Wģ���M�����о�����ȱ���wϵ�������������Ĕ��Wģ�ͽ����^�̡���ǰ�˹����Ļ��A�ϣ����ĸ�������늙C������Փ��늙C��ꇷ����������Y��cbdfm�����c���ƌ�����4�N��ͬ�ĄӑB���Wģ�͡��������oֹ����ϵ���Wģ�͡������ٶȃ������D����ϵ���Wģ�͡��D���ٶȃ������D����ϵ���Wģ�͡��pͬ���ٶȃ������D����ϵ���Wģ�ͣ��Ķ�������һ��������������cbdfm�ӑB���Wģ���ƌ��wϵ���������������c�M�з������ڴ˻��A�ϣ������D���ٶȃ������D����ϵ���Wģ�ͣ���cbdfm�M���˷��挍��C��ģ�͵����_�ԣ�����ԓ�늙C���o�ӑB���Է���������Ʋ����о��춨�����õ���Փ���A��
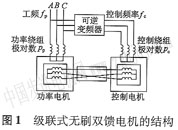
1 cbdfm�Ļ����Y������ԭ��
cbdfm�Ƀ��_�@��ʽ����늙C�����ɣ��Ѓ��ת����Ķ����@�M�̓��ת������D���@�M�����Ѓ����D���@�M���淴�����B�ӣ���Y����D1��ʾ���O������pp�Ķ��ӹ����@�Mֱ���c늾W�ӣ����l��fp�㶨���O������pc�Ķ��ӿ����@�M����׃�l�Դ��늣����l��fc���{��
���D���@�M���淴�����Y��r�£�cbdfm���B�\�Еr���D��nr�cpp��pc��fp��fc���Pϵ��
ʽ��:fcǰȡ��̖�r����ʾ�����@�M�c�����@�M���������������ͬ���˕r늙C�\���ڳ�ͬ����B;fcǰȡ̖ؓ�r����ʾ�����@�M����������෴���˕r늙C�\���ځ�ͬ����B�����cbdfm������늄Ӡ�B��ͨ�^�{�������@�M���l��fc�Ɍ��F��׃�l�{���\�У����cbdfm�����ڰl늠�B�r���ڲ�ͬ�D���£�ͨ�^�{�������@�M���l��fc�Ɍ��F��׃�ٺ��l�l��\�С�
2 cbdfm���ķN�ӑB���Wģ��
cbdfm�ĄӑB���Wģ���ɹ�����ϵ�yģ�ͺͿ�����ϵ�yģ�ͽM�ɣ��֞�늉����̡���朷��̡��D�ط��̺��\�ӷ��̡����˱��ڷ��������ȼ��O��
(1)������ϵ�y�У����ӹ����@�M�������@�M���D���@�M���Ԍ��Q�����a���Ĵńӄ��ؚ�϶�A�ܰ�����Ҏ�ɷֲ������Կ��g�C���͕r�g�C����
(2)���N�@�Mÿ����ԸС����к����㶨��
(3)���Դ�·��c�F�ēp�ġ�
2��1�����oֹ����ϵ�ϵĔ��Wģ��
2��1��1������ϵ�y
��������늙C������Փ���ɵ�cbdfm������ϵ�y��늉����̣�
˲�rֵ��i�������˲�rֵ��r�����@�M��裻�מ����@�Mȫ��朣���p��ʾ������ϵ�y��������s��ʾ���Ӆ�������r��ʾ�D�Ӆ�����
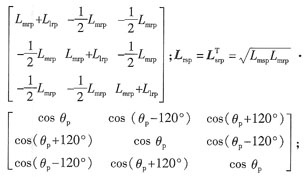
ÿ���@�M�Ĵ�������������Ըд�机������@�M�����Ļ��д��֮�ͣ���ˣ�ʽ(2)�еĴ�朾�ꇿɱ�ʾ�飺
ʽ�У�l msp��l mrp�քe�鶨���D�Ӹ�����@�M֮�g�Ļ���;l lsp��l lrp�քe�鶨���D�Ӹ�����@�M��©�У��ԡ��鹦����ϵ�y����a���S���c�D��a���S��֮�g������ |