����ģ�����Ƶ�ȼ�ͱ�ϵ�y(t��ng)��ģ�c����
�O�y�����R���䣬������
���������I(y��)��W�Ԅӻ��WԺ������710072��
ժҪ�������˟oˢֱ��늄әC( bldcm)���x�ıú�ģ����������ģ�ͣ��������ЙC�M�Ϙ�(g��u)����bldcm�(q��)�ӵ�ȼ�ͱ�ϵ�y(t��ng)��ģ�����Ʒ���ģ�ͣ��O(sh��)Ӌ�˻���������ȼ�ͱ��D(zhu��n)���]�h(hu��n)�����M���˷��棬����Y(ji��)���@ʾ������ģ������ϵ�y(t��ng)�����r�g�̣��o���{(di��o)���o��ʎ���o��(w��n)�B(t��i)�`���pid���ƾ��и���ĄӑB(t��i)푑����õķ�(w��n)�B(t��i)���ԡ�
�P(gu��n)�I�~���oˢֱ��늄әC��ȼ�ͱã�ģ�����ƣ�����
�ЈD���̖��tm36 +1��tp273+4 �īI��־�a��a ���¾�̖��
0�� ��
�S�������Ӽ��g(sh��)�����Ų��ϵİl(f��)չ�����şoˢֱ��늄әC( bldcm)����Y(ji��)��(g��u)���Ρ������ɿ��������L�����B(y��ng)�S���㡢���Ʒ��㣬߀���������D(zhu��n)�ش��^�d���������{(di��o)�ٷ����V��늙CЧ�ʸߵȃ�(y��u)�cԽ��Խ�õ��V���ؑ��á��������şoˢֱ��늄әC�(q��)�ӵ��x�ıã�������ߺ��հl(f��)�әC�����ܣ�Ҳ���ڌ��F(xi��n)ȼ�ͱõ��������ƣ�ԇ��C�������{(di��o)��(ji��)ȼ�ͱ��D(zhu��n)�ف��{(di��o)��(ji��)���������ĵĹ����hС�ڲ����y�T�{(di��o)��(ji��)�����r���ĵĹ��ʣ��D(zhu��n)���{(di��o)��(ji��)�������Դ���ܺġ�
ȼ�ͱ�ϵ�y(t��ng)��һ�������^���Ǿ��ԡ������ԡ�����ϵď��s����ϵ�y(t��ng)���ܵ��ضȡ��ȵȶ�N���_�����ص�Ӱ푣����Â��y(t��ng)�Ŀ��Ʒ����y�Ԍ��F(xi��n)��ȼ�ͱ�ϵ�y(t��ng)�����ÿ��ƣ���ģ��������Փ�ь��ҵij��콛(j��ng)��Ҏ(gu��)�t�ЙC�����˵����Ʋ����У������s��׃�ı��،����кܺõĿ���Ч���������O(sh��)Ӌ�˻���ģ�����Ƶ�ȼ�ͱÿ���ϵ�y(t��ng)����ģ���������뵽ȼ�ͱõ������h(hu��n)���M���˷��档
1�oˢֱ��늄әC��(sh��)�Wģ��
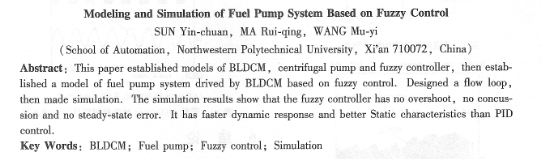
�oˢֱ��늄әC���w��(sh��)�Wģ�ͷ֞��IJ��֣�늉�ƽ�ⷽ��ģ�K����늄�Ӌ��ģ�K���D(zhu��n)��Ӌ��ģ�K���\�ӷ���ģ�K����D1��ʾ������block1�鷴늄�Ӌ��ģ�K��block2��늉�ƽ�ⷽ��ģ�K��block3���D(zhu��n)��Ӌ��ģ�K��block4���\�ӷ���ģ�K�����Ă�simulinkģ�K�M�нM�ϣ���(chu��ng)����ϵ�y(t��ng)��
�шDl�Пoˢֱ��늄әC��(sh��)�Wģ���M�з��b�����M�Пoˢֱ��늙Cϵ�y(t��ng)����r���Ϳ�������Ҫ�ĕr��ֱ���{(di��o)��ԓģ�K�����ڲ�����늙C��B(t��i)���̽�ģ�������挍��ӳ��늙C������B(t��i)׃�����挍��r���@�Ȍ��oˢֱ��늙C��Ч��ֱ��늙C���Â��y(t��ng)�Ă��f����(sh��)�M�еķ��淽��Ҫ�ʴ_�öࡣ
2�x�ı�ģ�͵Ľ���
������r�£�����O(sh��)����������D(zhu��n)��֮�g���P(gu��n)ϵ��һ�������P(gu��n)ϵ������
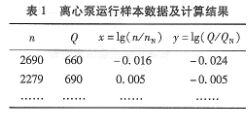
���ǣ��ڌ��H�\���У��Õ��ܵ����N���_�ӵ�Ӱ푣���ˌ��H�\�Еr���������D(zhu��n)��֮�g���ܺ��ε��þ����P(gu��n)ϵ��������ͨ�^�z�y�x�ı��ڲ�ͬ�D(zhu��n)�������y����������(sh��)��(j��)�������������D(zhu��n)��֮�g�ʷǾ����P(gu��n)ϵ������������ֵӋ���Խ�ʴ_��ϵ�y(t��ng)���{(di��o)��(ji��)����ԽС����(w��n)�B(t��i)���Ⱦ�Խ�ߣ�����б�ҪӋ����^�龫�_��������ֵ�����Բ��þ��Իؚw�������\�Д�(sh��)��(j��)����ȡ�D(zhu��n)�ٺ�����֮�g�ķǾ����P(gu��n)ϵ��
�����xȡ��һ�M�x�ıõ��\�Д�(sh��)��(j��)���1��ʾ��������(sh��)��(j��)�M��һ����̎�����ӱ���(sh��)��m��׃������(sh��)��g�����ɶȞ�mg�������P(gu��n)ϵ��
����(j��)�ɼ��Ĕ�(sh��)��(j��)�������
������
qi.���ԏ��x�ı�����ϫ@�ã��@�Ӿ͵õ����x�ı��������D(zhu��n)�ٱ��^�ʴ_���P(gu��n)ϵʽ���Ķ��ó����x�ıõĔ�(sh��)�Wģ�͡�
|