֧�������C������ڃ�늙C׃�lϵ�y(t��ng)�еđ�(y��ng)��
��╣�������
�����K��W늚���Ϣ���̌WԺ���(zh��n)��212013��
ժҪ��ᘌ���늙C׃�l�{(di��o)��ϵ�y(t��ng)�зǾ�����ģ�ͱ��R���y�Ć��}���������֧�������C����ϵ�y(t��ng)�����·�������ͬ�����D(zhu��n)�����£�������늙C׃�lϵ�y(t��ng)�Ĕ�(sh��)�Wģ�ͣ����M���˿����Է�����ͨ�^֧�������C�ؚw�ķ��������R��(g��u)��ԭϵ�y(t��ng)d�A��ϵ�y(t��ng)�������R������ϵ�y(t��ng)������ԭϵ�y(t��ng)֮ǰ��(g��u)�ɂξ��ԏ�(f��)��ϵ�y(t��ng)�����O(sh��)Ӌ�����]�h(hu��n)�������M�п��ơ�ԇ�Y(ji��)��������ԓ��������ه��ϵ�y(t��ng)ģ�ͣ���늙C����(sh��)�z�Ӽ�ؓ�d�_�Ӿ����^���������ԡ�
�P(gu��n)�I�~����늙Cϵ�y(t��ng)��֧�������C���������ƣ���ϵ�y(t��ng)
�ЈD���̖��tm359. 9��tm271+ 72 �īI��־�a��a ���¾�̖��1001-6848(2010) 04-0005-03
o�� ��
��늙Cͬ��ϵ�y(t��ng)�ǬF(xi��n)�����I(y��)���a(ch��n)�Б�(y��ng)�ñ��^�ձ��늿�ϵ�y(t��ng)���V����(y��ng)����ұ���켈�������ȇ���(j��ng)���ĸ����I(l��ng)������ԓϵ�y(t��ng)��һ����(f��)�s�ĸ��A���Ǿ��ԡ���׃�������ϵ�y(t��ng)��ϵ�y(t��ng)�ď����c��늙C���ٶȲ����P(gu��n)���ʂ��y(t��ng)�Ŀ��Ʒ����y�ԝM�㹤�I(y��)���a(ch��n)��Ҫ��
��ϵ�y(t��ng)�����ǽ����ᘌ���(f��)�s�Ǿ���ϵ�y(t��ng)�����һ�N�������Ի��Ͷ�׃������ķ�����ԓ����ͨ�^���ԭϵ�y(t��ng)�ġ��A��ϵ�y(t��ng)��Ȼ��ԭϵ�y(t��ng)����ϵ�y(t��ng)�B����һ���γ���һ�������f����(sh��)���A�e�����Ăξ���ϵ�y(t��ng)���M�����þ���ϵ�y(t��ng)���Ʒ����M�п��ơ����ǷǾ���ϵ�y(t��ng)�y�Խ������_��ģ�ͣ�ϵ�y(t��ng)��ģ�����y�������ɞ������ϵ�y(t��ng)������(y��ng)�õ�ƿ�i��
������֧�������C�ƽ�ԭϵ�y(t��ng)���A�e����ϵ�y(t��ng)�����cpid�]�h(hu��n)���ƽY(ji��)�Ϙ�(g��u)�Ƀ�늙C׃�l�{(di��o)��ϵ�y(t��ng)�����F(xi��n)��늙C�����c�ٶȵĽ������t4-si��
1��ϵ�y(t��ng)����
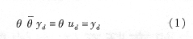
���B�m(x��)�Ǿ���ϵ�y(t��ng)����ϵ�y(t��ng)�������īI[1]�еĶ��x���o��һ�����Ի�Ǿ���ϵ�y(t��ng)�ƣ���ݔ�ˣ�ݔ������ʼ��B(t��i)��ӛ����ԓӳ���P(gu��n)ϵ�����ӡ�������ӝM����ʽ
�tԭϵ�y(t��ng)�ƷQ��ϵ�y(t��ng)�Ƶ���ϵ�y(t��ng)���t��ʽ
������ϵ�y(t��ng)�ƷQ��ϵ�y(t��ng)�Ƶ�a�A�e����ϵ�y(t��ng)��
��a=0�r�����A��ϵ�y(t��ng)���dž�λ��ϵ�y(t��ng)����Փ�ϣ�ϵ�y(t��ng)�ġ��A��ϵ�y(t��ng)���ڣ����λ��ϵ�y(t��ng)����ڣ����߿���D(zhu��n)�������磬���چ�λ��ϵ�y(t��ng)������ǰ�洮(li��n)�����e�֭h(hu��n)��(ji��)�������e�֭h(hu��n)��(ji��)�x���m����ֵ���t��(g��u)�ɡ��A��ϵ�y(t��ng)���ɷN��ϵ�y(t��ng)���D(zhu��n)�Q�P(gu��n)ϵҊ�D1��
����(j��)���˶��ɣ����]ǰ��������������������ʽ��
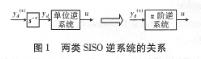
������ʸ�����Ʒ�ʽ�£�ϵ�y(t��ng)�Ĕ�(sh��)�Wģ�Ϳ��Ա�ʾ��
�ڴ�ͨ��(w��n)������r�£����Ⱥ͏���֮�g������P(gu��n)ϵ��׃����ʽ�Č��飺
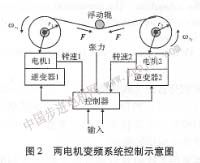
2��늙Cϵ�y(t��ng)��(sh��)�Wģ�ͼ������Է���
�D2���늙C׃�lϵ�y(t��ng)�ď����c�D(zhu��n)�ٿ���ʾ��D��
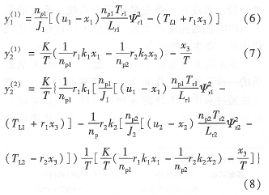
��ݔ����(d��o)����
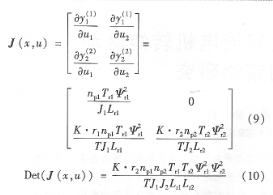
�tjacobi��ꇞ�
3����֧�������C����ϵ�y(t��ng)����
��֧�������C���Rԭ������ϵ�y(t��ng)���Ʒ������o������֧�������C���A��ϵ�y(t��ng)�Ę�(g��u)���㷨���£�
i)�_���m��?sh��)ļ�����̖���xȡ����S���ļ�����̖��ʹϵ�y(t��ng)���ܵõ���ֵķ���(y��ng)��
|