����vxworks��auv����늄Ӷ�C�������OӋ
����1��������2�������1��2
��1�������I��W�����WԺ������710072��2��ˮ����Ϣ̎���c����******���c����ң�����710072��
ժҪ�������һ�N����vxworks���r����ϵ�y��at91rm9200������ˮ�º�����늄Ӷ�C���������OӋ���o�������w��ܡ�Ӳ���·�D��ܛ��ģ�K�OӋ�����ø߾��Ȃ�������ģ��pid�㷨�Լ��p�]�h�������ƣ�ԓϵ�y�ڜyԇ�и��ָ�˅������_���A��Ч�����\�з����ɿ���
�P�I�~������ˮ�º�������늄Ӷ�C��vxworks��arm; at91rm9200
�ЈD���̖��tp275 �īI��־�a��a ���¾�̖��1001-6848[2010)04-0027-03
0�� ��
��C������ЙC����������ˮ�º�����( auv)�겻��ȱ�ٵ��P�I�M�ɲ��֣�������ָ�˵ă���ֱ��Ӱ�ˮ�º��������ƌ����ȡ��c��Ӷ�C��Һ����C����^��늄Ӷ�C���нY�����Ρ����ܿɿ����S�o���㡢���ƺ��εȃ��c������ˮ�º������еõ��V���đ���1���S��ˮ�º��������g�IJ���lչ������C������Ҫ��Խ��Խ�ߣ���������Ƕ��ʽӋ��C�ڿ���ϵ�y�еđ��ã�����Ô���ʽ��C������ȡ��ģ�M��C���������ڱ��С����ֶ�C�������\�ú��m�Ŀ����㷨��ʹ��C�_�������푑��ٶȺͿ��ƾ��ȡ����Č���Bһ�N��arm̎������vxworks���r����ϵ�y������ƺ��ĵ�ˮ�º���������늄Ӷ�C��������
1���w�OӋ
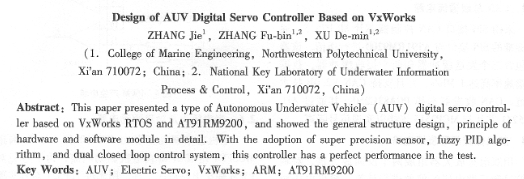
ԓ���ֶ�C�������Ļ���ԭ���ǣ��Ԅ��{�xͨ�^can�������ٶ���̖�Ԕ�����ʽ�l�ͽo��C���������O�ض�C��λ�à�B����C����������C��λ���M�вɘӲ��c�ٶ���̖���^�Ժ��m�Ŀ����㷨�M��̎����ݔ��pwm��̖����늙C���Ķ��M���]�h���F����C�Ŀ��ơ��係�w��D��D1��ʾ��
2Ӳ���OӋ
��C����ϵ�y��Ӳ����Ҫ��Ƕ��ʽ̎��������̖�ɼ��·��pwm�����c�{���·�����ƫ��̎���·����늸��x�·���������·����Ƿ����·�ȽM�ɡ�
2.1����cpu������·
����at91rm9200оƬ����̎��������Ƕarm920t�ˣ�����ȫ���ܵ�mmu���ⲿ�����ӿ�( ebi)������·�����r��·����λ�·��8mb norflash��32 mb sdram����̫�W�ӿڡ�jtag�ӿڡ��Դ�·�ȡ�
2.2 a/d��d/a�·
a/dоƬ����maxim��˾��12λ6ͨ������adcоƬmax196; d/aоƬ����maxim��˾��12λ����2ͨ������dacоƬmx7847��������ͨ�^�ⲿ����( ebi)�ccpu�B�ӡ�
��74hc138�g�a���a��Ƭ�x��̖����74hc244��74alvc164245���Farm��a/d��d/a֮�g������̖���_���ƽ�D�Q��
2.3 can����ͨ���·
����spi�ӿ�can������оƬmcp2515��ͨ�^�˜ʵ�spi�ӿ��cat91rm9200�M��ͨ�š�ԓ�������������l�;��_���̓ɂ����վ��_����������ݔ���ʸ��_1 mb/s������֧��can v2. ob���gҎ����can�հl���x��pca82c250����ͨ�^ad-um5241оƬ�cmcp2515�B���Ԍ��F��̖���x��
2.4��Cλ���]�h�����·
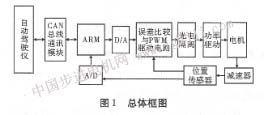
���p�\��Ŵ����M�Ƀɂ�����Ŵ�������ݔ����̖�ͷ���늉���ƫ���M��Ӌ�㣬ݔ��늉�����pwm�����M���{�ơ����·��D2��ʾ��
2.5 pwm���ήa����늙C�ٶȿ����·
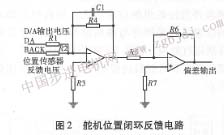
ԓϵ�y����uc3637�a�����p�O��pwm��̖�����p���ֱ��늙C�{��ϵ�y��
����Ҫ�����ǣ��a�����Dz���̖���cݔ�������̖�ͷ�����̖��ƫ���M�ЯB�ӣ�ͨ�^���õăɂ����^���a��pwm��̖����늙C���D�١��a�����Dz����·��D3��ʾ��ԓ�·�У�k= 15 v��r1= r2= r3= 10 k0. rt = 33 k��,t=0.01 plf=l khz�����Dz��cݔ�������̖�ͷ�����̖�� |