����ͬ��늙C(j��)ģ����ģ����ϵ�y(t��ng)���о�
��Y2�����P��1�����S1����һ2
��1�Ї�(gu��)�V�I(y��)��W(xu��)��늌W(xu��)Ժ������2210082�����K��W(xu��)늚���Ϣ���̌W(xu��)Ժ���(zh��n)��212013��
ժҪ��ᘌ�(du��)����ͬ��늙C(j��)������D(zhu��n)��?g��u)?qi��ng)��ϵ����c(di��n)���O(sh��)Ӌ(j��)��һ�N����ģ����ģ���ƵķǾ���늙C(j��)�D(zhu��n)�ٿ���������(y��ng)��ģ�����ƌ�(sh��)�F(xi��n)��ģ�ГQ���ֵĿ��ƣ��p�p�˂��y(t��ng)��ģ���ƵĶ���F(xi��n)�����˲���ԓ������������ͬ��늙C(j��)�D(zhu��n)�ٿ���ϵ�y(t��ng)�ķ���ģ�͡�����Y(ji��)�����������Ʒ�����Ч�،�(sh��)�F(xi��n)��늙C(j��)���D(zhu��n)�ٸ�ۙ���������õĄ�(d��ng)���o�B(t��i)���Ժ������ԡ�
�P(gu��n)�I�~������ͬ��늙C(j��)��ģ�����ƣ���ģ���ƣ��Ǿ���
�ЈD���̖(h��o)��tm341, tm351 �īI(xi��n)��(bi��o)־�a��a ���¾�̖(h��o)��1001-6848{2010)04-0058-03
0�� ��
��������ͬ��늙C(j��)�{(di��o)��ϵ�y(t��ng)�����ķǾ����Լ�늙C(j��)����(sh��)����(zh��n)�_�����أ�ʹ�Ì�(du��)�䌍(sh��)�F(xi��n)�߾��ȿ��Ƴɞ���һ��(g��)��(f��)�s�Ć��}������������ЌW(xu��)�ߌ��������ơ����_���Ի����ơ���ģ���ƵȷǾ��Կ�����Փ��(y��ng)��������ͬ��늙C(j��)���D(zhu��n)�ٿ����У���ȡ�������õ�Ч����ģ����ģ����( fsm)��ֽY(ji��)����ģ�����ƌ�(du��)��(sh��)�W(xu��)ģ����ه�Բ���(qi��ng)�����\(y��n)�ÿ��ƌ�����Ϣ�������Ժõă�(y��u)�c(di��n)���Լ���ģ���ƽY(ji��)��(g��u)��(ji��n)�Σ������ԏ�(qi��ng)�����c(di��n)���Ķ���(ji��n)�����ƽY(ji��)��(g��u)�����p�p���y(t��ng)��ģ�����еĶ���F(xi��n)��
�����ڑ�(y��ng)�÷������Ʒ����Ļ��A(ch��)���O(sh��)Ӌ(j��)�͌�(sh��)�F(xi��n)������ͬ��늙C(j��)ģ����ģ�D(zhu��n)�ٿ�������Ԕ�M�ķ�����������Ŀ��Ʋ��ԣ���ͨ�^�����(y��n)�C�˿��Ʒ�������Ч�ԡ�
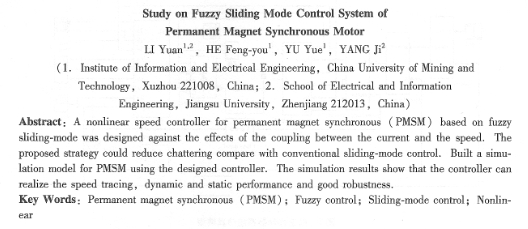
1����ͬ��늙C(j��)�Ĕ�(sh��)�W(xu��)ģ��
���в��õ�pmsm��(sh��)�W(xu��)ģ�ͻ���ͬ�����D(zhu��n)�D(zhu��n)������(bi��o)���������O(sh��)����ֱ�S늸���ȣ���ld=lq=l0
ʽ�У�ud��uq��d��q�S����늉���id��iq��d��q�S���������r�鶨����裻l�鶨��늸У�tl��ؓ(f��)�d�D(zhu��n)�أ�j���D(zhu��n)��(d��ng)�T����b��ճ��Ħ��ϵ��(sh��)��p�O��(du��)��(sh��)���؞��D(zhu��n)�ӽ��ٶȣ���f�����Ŵ�ͨ��
2����ϵ�y(t��ng)���O(sh��)Ӌ(j��)
����(j��)ģ����ģ����ԭ�����������ɵ�Ч����ue q���ГQ����usw�ɲ��ֽM�ɼ���
���Ц�nz��ģ����������ݔ������(d��ng)?sh��)��_(d��)��ģ��r(sh��)����nz=0����(d��ng)��nz =1�r(sh��)������Ҏ(gu��)��ģ���ơ�
2.1��Ч���Ʋ����O(sh��)Ӌ(j��)
���ȣ�����ϵ�y(t��ng)����****�D(zhu��n)�أ��������(id=o����)�����Զ��x��
��(du��)ʽ(3)��(d��o)���t�У�
���xlyapunov����(sh��)h��
��(du��)ʽ(5)��(d��o)���t�У�
��˶���늉�ֱ�S�����ĵ�Ч���Ʋ��ֿ���ȡֵ�飺
�tʽ(6)���Ԍ�����
������x��
���O(sh��)ϵ�y(t��ng)�o���ٶ���̖(h��o)һ�A�����A�Ɍ�(d��o)����(du��)ʽ(9)��(d��o)�ɵã�
|