����������ģ��pid��������srm�{��ϵ�y
������1���ɏ2
(1�ijǴ�W��ɽ�|�IJ�252059��2ɽ�|�ڶ����g�WԺ��ɽ�|�ij�252027)
ժҪ���Ԕ�����̖̎����������оƬ���������_�P����늄әC�{��(srd)����ϵ�y���OӋ��������ģ��pid�����������F���_�P����늄әC�D�ٵČ��r���ơ�����C����������ģ��pid����������ģ����������pid�������ă��c������Ч�pСϵ�y���{���s��ϵ�y�{���r�g�����ϵ�y���B���ȣ�����һ�N��Ч�Ŀ����㷨�������^�ߵđ��Ãrֵ��
�P�I�~��������ģ��pid���������_�P����늄әC��dsp���{��ϵ�y
�ЈD���̖��tm352 �īI���R�a��a ���¾�̖��1004��7018(2010)04��0045��03
0����
���_�P����늄әC���F�������Ӽ��g�c���Ƽ��g��һ�w���_�P����늄әC�{��(srd)ϵ�y����늙C�Y�����Σ��ɱ�������ϵ�y�ɿ��Ըߣ��{�ٷ����V�����Ԍ��F�������D�غ͵���������ȃ��c����һ�N****�lչ����������늙C�{��ϵ�y[1]�����ǣ������_�P����늄әC���Ї��صķǾ��Լ�׃�Y����׃�������c���y�Խ������_�Ĕ��Wģ�ͣ����ڲ�ͬ�Ŀ��Ʋ������䅢�����Y������׃���ģ���˹̶�������pid���Ʒ�ʽ�y�ԫ@������Ŀ�������[2]��ģ��������Ŀǰ�����^���һ�N���ܿ��Ʒ������o�豻�،���ʴ_�Ĕ��Wģ�ͼ��܌��F�^�õĿ���Ч���������c�Ǯ������l���ڴ���׃�ӕr���ӑB푑��죬���{С���Ҿ��кܺõ������ԡ���ģ�����Ƶ�ϵ�y���ֺ��y�������B�`�������׃���ּ���������r�£�������ƽ���c��������С����ʎ�F��[3]��ᘌ�������r�������څ���һЩģ�����ƺ�ģ��pid�����㷨[4-5]���Ļ��A�ϣ��OӋ�˲���������ģ��pid���������ٶ��{�������Ԕ�����̖̎����
0����
���_�P����늄әC���F�������Ӽ��g�c���Ƽ��g��һ�w���_�P����늄әC�{��(srd)ϵ�y����늙C�Y�����Σ��ɱ�������ϵ�y�ɿ��Ըߣ��{�ٷ����V�����Ԍ��F�������D�غ͵���������ȃ��c����һ�N****�lչ����������늙C�{��ϵ�y[1]�����ǣ������_�P����늄әC���Ї��صķǾ��Լ�׃�Y����׃�������c���y�Խ������_�Ĕ��Wģ�ͣ����ڲ�ͬ�Ŀ��Ʋ������䅢�����Y������׃���ģ���˹̶�������pid���Ʒ�ʽ�y�ԫ@������Ŀ�������[2]��ģ��������Ŀǰ�����^���һ�N���ܿ��Ʒ������o�豻�،���ʴ_�Ĕ��Wģ�ͼ��܌��F�^�õĿ���Ч���������c�Ǯ������l���ڴ���׃�ӕr���ӑB푑��죬���{С���Ҿ��кܺõ������ԡ���ģ�����Ƶ�ϵ�y���ֺ��y�������B�`�������׃���ּ���������r�£�������ƽ���c��������С����ʎ�F��[3]��ᘌ�������r�������څ���һЩģ�����ƺ�ģ��pid�����㷨[4-5]���Ļ��A�ϣ��OӋ�˲���������ģ��pid���������ٶ��{�������Ԕ�����̖̎����ϵ�y�У�tms320f2407�Ĺ����ǾC��̎���ٶ�ָ��ٶ���̖�Լ������������λ�Â������ķ�����Ϣ��ͨ�^pwm�l��������׃�Q��һ�^�����p�O���w��(igbt)ݔ��pwm��̖������igbt�Ĺ�����B�����F��srm�\�Р�B�Ŀ��ơ�λ�Ùz�y�b�Ì�srm���D��λ���M�Йz�y�������z�y��̖����dsp��cap��Ԫ����̎����õ�늙C���ٶȺ��D�Ķ�����ٶȭh���]�h���ơ�����z�y�b�����ڙz�y늙C��������������x�Ŵ������dsp��a��d�ӿڣ����Fģ�M�����������D�Q���^�����F����h���]�h���ơ�����׃�Q���������Ǟ�srm���\���ṩ������
�����_�P����늙C�Ŀ��ƣ����y�ķ����������Ӻ͵��ٕr��������ز����ƣ����ٕr���ýǶ�λ�ÿ��ơ��䃞�c�ǿ���ͨ�^�����x����ʹ���_�P����늙C�������\�з����ȹ������^�Ѡ�B���������ģʽ�D�Q��������Ə��s���ɱ�ƫ�ߡ�������pwm���g���̶���ͨ�ǣ����{��ϵ�y�Ĺ����_�P��ʩ�ز������F�{���{�٣��������ٶȷ����Ȍ��F��һģʽ���ƣ����ƺ��Ρ��ԃr�ȸߡ�tms320f22107ǡ�Î���pwm�l����Ԫ�����Ԯa��8·���пɾ������^�Ϳ�׃ݔ���O�Ե�pwm��̖��pwm��̖���^��늸��x��ݔ�뵽����׃�Q�·�����Կ���늙C���\�С�
2������ģ��pid���������OӋ
2��1�������Y��������ԭ��
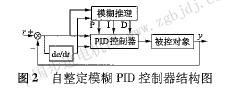
������ģ��pid�������Ƀɲ��֘��ɣ�����Ҏhd���Ʋ��ֺ�ģ�������ą���У�����֣���D2��ʾ��
������ģ��pid�������Ĺ���ԭ���ǣ����\����ͨ�^�����z�yƫ��e��ƫ��׃����ec������ݔ��ģ�� |