����iitae�u�rָ�˵Ľ����ŷ�ϵ�y�����Ԅ������о�
��iչ����С��������s
���A�пƼ���W���Ҕ���ϵ�y���̼��g�о����ģ���h430074��
ժҪ�����������ŷ�ϵ�y�Ŀ��������u�r�����ھC�ϱ��^��ise��iae��itae�������u�rָ�˵����Ժ��OӋ��һ�N��tae�����M��itaeָ�ˣ������ŷ�ϵ�y�Ŀ��������u�rָ�ˣ�����ԓָ���OӋ�˻�������݆�Q�㷨���ŷ����ƅ���������ģ�ͣ����M���ˌ��r�����о����Y��������iitae�����u�rָ�˾����^�õ��m���ԣ�����݆�Q�㷨�ǫ@ȡ�ŷ�ϵ�y�������ƅ����ĸ�Ч;����
�P�I�~���ŷ��������u�rָ�ˣ�����݆�Q�㷨��������
�ЈD���̖��tp273+��24 �īI��־�a��a ���¾�̖��1001-6848( 2010) 02-0070-04
0�� ��
�ŷ�ϵ�y�V������pid�{������A�Ŀ��Ʋ��ԣ�ϵ�y�������ܵĺÉ���Ҫ�Q�����O�õ�pid���ƅ��������˱��Cϵ�y�@�����õ��ŷ����ܣ����ƅ�����횸����ŷ�ϵ�y���H������B�M���m�������������������������Hʹ�ŷ�ϵ�y�o��������****��B��ͬ�r߀������ϵ�y��ʎ�������������Hϵ�y��ɓp����
�ٶȭh���ƅ����������ŷ�ϵ�y������������Ҫ���֣�����ؓ�d������B�ĸ�׃�������ŷ�ϵ�y�ٶȭh���Ĺ������l��׃������ˣ���������r�l�����회��ŷ�ϵ�y�Ŀ��ƅ����M����������������ʹ�ŷ�ϵ�y�������õĿ������ܡ�
�ڌ��H�����У��ŷ����ƅ����Զ�һ험O�䷱�����^�̣�һ���ɲ����ˆTͨ�^�����Hϵ�y�M�з����{ԇ��@ȡ�ģ������^�̺ܴ�̶�����ه���˵Ľ����y�ڶ̕r�g�ȴ_��һ����ϵ�y���õ���Ч������
�����܉��Ч���M���ŷ����ƅ�����������횽���һ�������������ŷ����������u�rָ�ˣ��Ա��܉���١��ʴ_��ȫ��،������ŷ�ϵ�y�Ŀ������������u�r�������Դ������ŷ�ϵ�y��ͬ���ƅ����M�σ��ӵ��u�И˜ʡ��ŷ����ƅ���������Ŀ���ǫ@ȡʹϵ�y���Ѓ����������ܵĿ��ƅ����M�ϣ���ˣ��ڽ����˺��m���ŷ�ϵ�y�u�rָ�˺��������^�̿����D������ȡ���Կ��ƅ�����׃�����u�rָ�˞�Ŀ�˺����ĘOֵ�⡣
1 ��������݆�Q�ą��������㷨
������������֪���ŷ�ϵ�y�Ŀ��ƅ������������������u�rָ�˞�Ŀ�˺����ă����^�̣������Y������ij�N������B�µ�****�ŷ��������ܣ�****���܌���������׃��������Ҫ�������ŷ����ƅ�����
����݆�Q��һ�N���ٵą��������������dz��m���ڶ�׃���ă������}����^�̡��ŷ�ϵ�y�ą�����Ŀ���࣬����ͨ�^����݆�Q�㷨�����M�Ѓ������Դ˿�������ŷ�ϵ�y�ą����Ԅ�������
����݆�Q���ĺ���ʹ�Ѷ�׃���ă������}݆�����D�����׃���ă������}�����ڢ��S���}�������Ȍ�n-i��׃���̶����ӣ�ֻ����һ��׃���M��һ�S�������õ���һ��****�c��Ȼ���ٓQһ��׃����ͬ���M��һ�S�������õ��ڶ���****�c������^�m��ȥ��ֱ�����һ��ѭ�h����n��׃��݆�Q�ꮅ���õ��ڂ�****�c�����һ݆Ӌ�㣬���Ӌ��Y���M�㲻�˽o�����Ք�Ҫ�t����һ݆����ĩ�c�_ʼ����һ݆Ӌ�㣬����^�m��ȥ��ֱ���Ք���****�c��ֹ�����ڽ����ŷ�ϵ�y��һ�������ʽ(1)��ʾ��pi���ƽY��������ƅ�����e��t��
���ŷ�ϵ�y�Ŀ��ƅ��������^�̿����J����kp��e��׃�������������u�rָ��j��Ŀ�˺����Ķ�Ԫ���������^�̡���ˣ���������������݆�Q�����Ķ�Ԫ���������^���M��ӑՓ��
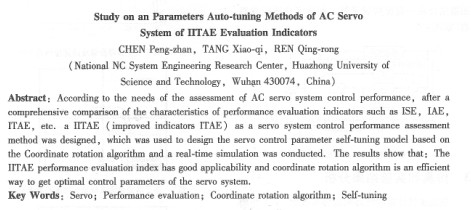
�O��Ԫ�����飺j (x)=f��x1��x2�����Oֵ�c���څ^�g�顣ai��xl��b1��a2��x2��b2������ÿ���_������ֵ������һ�l�ȸ߾�(Ŀ�˺���j(x)����ijЩ����ֵ�r���c���B���Q��ȸ߾����c֮��������D1��ʾ��
�O��ʼ�c��x (0)=(x1 (0)��x2 (0))���ɳ�ʼ�c���l���ȹ̶�x1(x1=x1 (0) )��׃��׃��x2������x2���׃����Ŀ�˺�����****�cx1 (1)=(x1 (1)��x2 (1))��Ȼ��̶�x2����x2= x2 (1)����׃��׃��x1�������x1���׃�� |