PLc�����ګ@ȡ��������(sh��)��(j��)�еđ�(y��ng)��
����
(���܊��ӹ��̌W(xu��)Ժ�����պϷ�230037)
ժҪ����B�������T��s7��200�ɾ��̿�����ͨ�^Rs-485�����B�Ӄɂ��������y���D(zhu��n)���c�Ƕȣ����Ы@ȡ�D(zhu��n)�ٺͽǶȔ�(sh��)��(j��)�����M�Д�(sh��)��(j��)̎����
�P(gu��n)�I�~��PLc��s7��200��Rs-485������ͨ��
�ЈD���̖��T3��1383��2 �īI��(bi��o)�R�a��A ���¾�̖��1004-7018(2008)06��0013��03
0�� ��
S7��200�����T�ӹ�˾���Ƶ�һ�Nн�Ϳɾ��̿��������������ɿ����������惦�������̷��㣬���ɔ_���������������^����ͨ�Ź��ܡ���˿���ͨ�^���Ĵ����cӋ��C�����������b���M��(li��n)�W(w��ng)��ͨ�ţ��F(xi��n)�����I(y��)�O(sh��)��������ܻ���ģ�K�������c������ֻ��Ҫ��λ�C�l(f��)��һ�lָ��Ϳ��Ԫ�����ɹ����������Y(ji��)��ͨ�^�������ؽo��λ�C�����乤�����g����Ҫ�κ������O(sh��)��ĸ��A(y��)���@�ͽo��λ�C���Еr�g������������������ڱ���ϵ�y(t��ng)�ķ�(w��n)����������Ҫ���á����Ľ�B��ϵ�y(t��ng)��s7��200ͨ�^Rs-485�����B���ٶȺͽǶȂ��������ǶȺ��ٶȂ������ֲ��ڹ��I(y��)�F(xi��n)���IJ�ͬλ�ã�PLc�������l(f��)�͜y��ָ��������յ�ָ�����PLc�������ٶȺͽǶ�ֵ�Ĕ�(sh��)��(j��)������PLc��ɔ�(sh��)��(j��)̎���΄�(w��)��
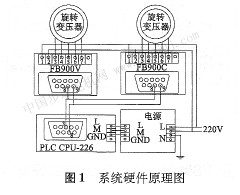
lϵ�y(t��ng)Ӳ����(g��u)��
��ϵ�y(t��ng)��Ҫ���Դģ�K��PLc���ɂ��ֲ��ڲ�ͬ���ص����D(zhu��n)׃������FB900c��FB900v׃������(g��u)�ɣ���D1��ʾ���Դģ�K��PLc�ṩ24 Vֱ��늣������FB900c��FB900V�ṩ220 V����늣�PLc��Rs-485�ڵ�3��8�ǔ�(sh��)��(j��)4��B�ˣ���FB900c��V��8��9��Rsһ485�Ĕ�(sh��)��(j��)A��B�ˣ����FB900c��V���ڵ�8��9�քe�cPLc���ڵ�3��8���B��FB900c��V�ϵĶ���̖�����������Ξ�1��7������1��2�鹩늶˿ڣ�3��4��FB900c��V�����D(zhu��n)׃�����ṩ��8 V����늣�5��6��7�����D(zhu��n)׃������FB900C��V�ṩ����̖��
2ܛ���O(sh��)Ӌ���w˼·
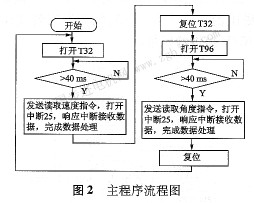
FB900c��V�����D(zhu��n)׃������������̖�քe�D(zhu��n)�Q�ɽǶȺ��ٶȔ�(sh��)��(j��)��ͨ�^Rs-485��������PLc����PLc�����M��̎�������˱��┵(sh��)��(j��)��ݔ�^���аl(f��)����(sh��)��(j��)�_ͻ����FB900C��V�O(sh��)�ó�ָ�����ģʽ��F(xi��n)B900C��V�յ�����(y��ng)��ָ��͕���Rs 485�����ς����нǶȺ��ٶȵĔ�(sh��)��(j��)���]���յ�����(y��ng)��ָ��Ͳ����l(f��)�͔�(sh��)��(j��)�����˱��┵(sh��)��(j��)�_ͻ�����÷֕r�xȡFB900C��FB900V��(sh��)��(j��)��ʽ����PLc�Ȱl(f��)���xȡ�ٶȔ�(sh��)��(j��)ָ�F(xi��n)B900V�յ�����������ς����ٶȔ�(sh��)��(j��)��PLc�յ������ϵĔ�(sh��)��(j��)����惦���������M��̎������ɔ�(sh��)��(j��)̎����PLc�ٰl(f��)���xȡ�ǶȔ�(sh��)��(j��)ָ�F(xi��n)B900C�յ�ָ����������ς��ͽǶȔ�(sh��)��(j��)��PLc�յ������ϵĔ�(sh��)��(j��)����惦���������M��̎������ɔ�(sh��)��(j��)̎����PLc�ٰl(f��)���xȡ�Ƕ��ٶȔ�(sh��)��(j��)ָ����β���ѭ�h(hu��n)��ȥ���֕r������PLc�Ķ��r��B2��T196��ɣ�T32���r�tT96��(f��)λ,���T96���r���tT32��(f��)λ������ѭ�h(hu��n)�����������ڶ���40 ms��T32����40 ms�r��PLc�l(f��)���xȡ�ٶ�ָ������_�Д��¼�25��F(xi��n)B900V�����ٶȔ�(sh��)��(j��)��PLc푑�(y��ng)�ַ��Д�����ꔵ(sh��)��(j��)��͌���̎���ꮅ��������T32��(f��)λ���ٴ��_T96ֱ��T96����40 ms��PLc�l(f��)���xȡ�Ƕ�ָ������_�Д��¼�25��F(xi��n)B900C���ͽǶȔ�(sh��)��(j��)��PLc푑�(y��ng)�ַ��Д�����ꔵ(sh��)��(j��)��͌���̎���ꮅ��������T96��(f��)λ�����_T32����˲���ѭ�h(hu��n)�����̈D��D2��ʾ�������̈D�Ѓɂ����r�����δ��_�͏�(f��)λ����(d��ng)ÿ������Ӌ�r��40 ms�����|�l(f��)����l(f��)������(y��ng)���x��(sh��)ָ�푑�(y��ng)�ַ������Д���Ղ������l(f��)���^���Ĕ�(sh��)��(j��)��̎�����յ��Ĕ�(sh��)��(j��)�����r��T32��T96��������ɼ��ٶȡ��ǶȔ�(sh��)��(j��)��(bi��o)־��̖�����ã�����߀����ͨ�^���Ķ��r�����ӕrֵ�����Ʋɼ���������̖�����ڡ��l(f��)��ָ����Ք�(sh��)��(j��)����(sh��)��(j��)̎�������µĺ��m(x��)������Ԕ��(x��)��B�������������оͲ��������ˡ�
 3 PLc��FB900C��V���څ���(sh��)���O(sh��)��
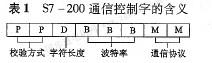
SMB30��SMBl30��s7��200��ͨ�ſ����֣��Á��O(sh��)��ͨ�ŵIJ����ʣ���żУ�λ��ֹͣλ���ַ��L�ȡ�SMB30����(y��ng)�˿�0��SMBl30����(y��ng)�˿�1��SMB30��SMBl30�ĸ�λ�����x���1��ʾ��
���У�Уʽ��00��11����oУOl��żУ10����У�ַ��L�ȣ�O������ַ���Ч��(sh��)��(j��)��8λ��l����Ч��(sh��)��(j��)��7λ�������ʣ�000��38 400��001��19 200��010��9 600����l(w��i)��4 800��100��2 400��101��1 200��110��600��111��300��ͨ�Ņf(xi��)�h��00
��PPI�f(xi��)�h��վģʽ��01�����ɿڅf(xi��)�h��10��PPI�f(xi��)�h��վģʽ��1l�鱣����ȱʡ�O(sh��)�Þ�PH�f(xi��)�h��վģʽ��
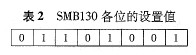
FB900V��c׃��������̖���ò����ʞ�9 600����(sh��)��(j��)λ��7λ��Уʽ��żУ�������O(sh��)��ͨ�^ُ�I�r�Ԏ���ܛ�����O(sh��)����PLc��ͨӍ�f(xi��)�h�������ɿڅf(xi��)�h�����ˌ��F(xi��n)PLc�cFB900V��c֮�g�܉���͔�(sh��)��(j��)���Ĵ���SMBl30�ĸ�λ��ֵ���O(sh��)�����2��ʾ���ı�2�пɵó�SMBl30����(y��ng)��16�M�Ɣ�(sh��)��69��
4��(sh��)��(j��)�İl(f��)���c����
FB900C��V���x��(sh��)ָ���ʽ���3��ʾ��
FB900C��V�xȡ�ٶȺͽǶȔ�(sh��)��(j��)ָ����ַ�λ����52H���Y(ji��)��λ����ODH(�S��Ҏ(gu��)��ֵ)��ģ�K��̖���Ը���(j��)��Ҫ�����O(sh��)����FB900V��ģ�K��̖�O(sh��)��30H��32Hؓ(f��)؟(z��)�����ٶȔ�(sh��)��(j��)��F(xi��n)BOOD��ģ�K��̖�O(sh��)�飺30H��31Hؓ(f��)؟(z��)���ͽǶȔ�(sh��)��(j��)��FB900V�ٶ�׃�����Ĕ�(sh��)��(j��)ݔ��ָ���ʽ���4��ʾ��
FB900C�Ƕ�׃�����Ĕ�(sh��)��(j��)ݔ��ָ���ʽ���
5��ʾ��
PLc�l(f��)��ָ��(XMT)����l(f��)�͔�(sh��)��(j��)���_�^(q��)(TBL)����(sh��)��(j��)���_�^(q��)��һ����(sh��)��(j��)ָ����Ҫ�l(f��)�͵��ֹ�(ji��)��(sh��)��****��(sh��)��255����PORTָ�������ڰl(f��)�͵Ķ˿ڡ��l(f��)���xȡ�ٶȔ�(sh��)��(j��)ָ��͌�04��52��30��32��OD(����16�M��)���˰l(f��)�;��_�^(q��)���l(f��)���xȡ�ǶȔ�(sh��)��(j��)ָ��͌�04��52��30��3l��0D(����16�M��)���˰l(f��)�;��_�^(q��)���l(f��)�������_�ַ������Д࣬��ϵ�y(t��ng)���õ��Ƕ˿�1������(y��ng)���Д�̖��25��ÿ����һ���ַ��a(ch��n)��һ���Д࣬�Д�朽ӵ��Д�̎�������Д�̎������?q��)����յ��惦��SMB2�е��ַ������D(zhu��n)�浽PLc��Ĵ惦�^(q��)��
�������l(f��)�͔�(sh��)��(j��)��ʽ���6��ʾ��l���_ʼλ��2��3��׃������̖��4�Ǡ�B(t��i)λ(ָݔ����(sh��)��(j��)�Ġ�B(t��i)����D=�ǶȔ�(sh��)��(j��)��y=�ٶȔ�(sh��)��(j��)��E=׃�������e)5�锵(sh��)��(j��)�ķ�̖��6λ�Ժ�锵(sh��)��(j��)(�ǶȔ�(sh��)��(j��)�����8λ��(sh��)��(j��)+lλС��(sh��)�c���ٶȔ�(sh��)��(j��)�����4λ��(sh��)��(j��)+1λС��(sh��)�c)�����һλ��Y(ji��)��λcR(0DH)��
���ж���16�M�ƵĽǶȔ�(sh��)��(j��)������׃������̖��01��ݔ���ǶȞ�268��������(y��ng)�ַ�(ASC��a)���7��ʾ��
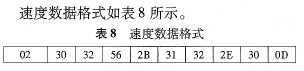
�ٶȔ�(sh��)��(j��)��ʽ���8��ʾ��
���ж���16�M�Ƶ��ٶȔ�(sh��)��(j��)������׃������̖��02��ݔ���ٶȔ�(sh��)��(j��)��12��O�r������(y��ng)�ַ�(ASC��a)���9��ʾ��
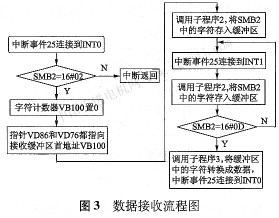
PLc���Ղ������l(f��)�́��Ĕ�(sh��)��(j��)���Ƿ��յ�02H���_ʼ������]���յ�02H�t�Д�أ��յ�02H�t�����m(x��)�ַ��D(zhu��n)�Ƶ�PLc��ָ���Ĵ惦��Ԫ���z��Ƿ���ܵ�0DH�����յ��Y(ji��)��λ0DH���_ʼ�����յ��Ĕ�(sh��)��(j��)�M��̎������(sh��)��(j��)�Ľ���������D3��ʾ���ڔ�(sh��)��(j��)���������У�ÿ����һ���ַ��͕��a(ch��n)��һ���ַ������Д࣬IN���INTl�����Д����(w��)�����ڛ]���յ���ʼ�ַ��rINTO��a(ch��n)�����ַ��Д����(w��)��INTD�����Д��յ����ַ��Ƿ���02H�����ǣ��͌��ַ����_�^(q��)�ĵ�һ���ֹ�(ji��)VBl00���㣬�{(di��o)���ӳ���2��02H����vBl00֮��Ĵ惦��Ԫ�У������͌�INTl�B�ӵ��ַ��Д࣬�@�rINTl��a(ch��n)�����ַ��Д����(w��)(INT0��������)�����յ���ʼ�ַ���a(ch��n)����ÿ���ַ��Д࣬�Д����(w��)����INTl���{(di��o)���ӳ���2�����յ����ַ�������ʼ�ַ��ĺ��m(x��)��Ԫ�С�INTl�ڴ惦�յ����ַ���߀�Д��յ����Ƿ��Y(ji��)���ַ������յ������{(di��o)���ӳ���3�M�Д�(sh��)��(j��)̎������IN��ٴ��B�ӵ��ַ��Д�(�˕rINTl��������)����(zh��n)���M����һ�M��(sh��)��(j��)�Ľ��ա�
�ӳ���2���a����:
LD SM0.0//�b�dָ��
INCB VB100//�ַ�Ӌ��(sh��)����1
INCD VD86//ָ�VD86��1
MOVB SMB2,VD86//�ַ�����ָ�?bi��o)�ָ��Ԫ�ӳ��?�锵(sh��)��(j��)̎������,�ں���������Ќ���Ԕ��(x��)��B���������̈D. 5��(sh��)��(j��)̎��
�Ă����������^���Ĕ�(sh��)��(j��)ֻ�Ǐ�02H��0D11֮�g��һ�M16�M���ַ���߀�o��ֱ�ӌ������������ĽǶȺ��ٶ�ֵ��һ����(sh��)����ʽ��ʹ�á��������v�Ĕ�(sh��)��(j��)̎����ֻ�ǏĽ����^����һ�M�ַ���ȡ�����������ٶȺͽǶ�ֵ����(sh��)��(j��)̎�����P(gu��n)�I�����ҳ�02H��0DH֮�g�Ĕ�(sh��)��(j��)λ�ͷ�̖λ�������䰴�գ�Y=��(x1-30H)��1+(x2��30H)��lO+(x3-30H)��100+(x4��30H)��1000+(x5��30H)��10000������Ӌ�������(y��ng)��ʮ�M��ֵ��x1��0DHǰ�ĵ�һ���ַ���x2��0DHǰ�ĵڶ����ַ���x3��0DHǰ�ĵ������ַ����������ֱ����̖λ����ĵ�һ���ַ��������Ќ���(sh��)��(j��)���ȵ�Ҫ����Ҫ���_��С��(sh��)λ��������0DHǰ�ĵڶ����ַ���2E���t��x1��ODHǰ�ĵ������ַ���x2��0DHǰ�ĵ��Ă��ַ���x3��0D}Iǰ�ĵ��傀�ַ��������ֱ����̖λ����ĵ�һ���ַ���ܛ�����F(xi��n)�rָ�V1396��vD86��ָ��0DH��V1376ָ��02H��VD86-VD76��6�麬�Д�(sh��)��(j��)λ�Ă���(sh��)����(sh��)����6�t�^�m(x��)��(zh��)�к��m(x��)ָ���t�յ����ַ��M�в����Д�(sh��)��(j��)(�@�N��r����ʼ�ַ���ģ�K��̖����B(t��i)λ����̖λ�ӽY(ji��)���ַ��������^6λ)�����ؼ��ɡ�VW520����˔�(sh��)��(j��)�Y(ji��)������̖λ�顰-���rֻ����O�pȥVw520�Y(ji��)���ٴ���VW520���ɣ���̖λ�顰+���r����Ҫ���κ�׃����ܛ��̎��������D4��ʾ�����̈D�У�ָ�VD86��VD96��ָ��Y(ji��)���ַ���VI)76�ڔ�(sh��)��(j��)������������ָ����ʼ�ַ���VD86-VD76����� 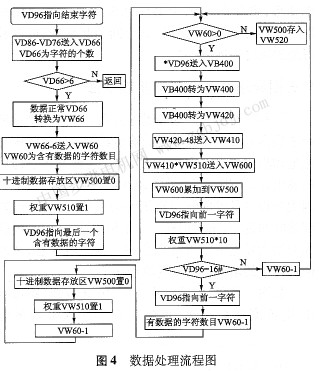 ���վ��_�^(q��)�ַ��Ă���(sh��)���Ƅ�ָ�VD96�������ҳ���λ��ʮλ����λ�Ȍ���(y��ng)���ַ���VW60���ǂ��������y��(sh��)��(j��)��Ч��(sh��)��(j��)�Ă���(sh��)���Á��Д���ۼ��Ƿ�Y(ji��)����VW600���ǂ��������y��(sh��)��(j��)��Чλ����(y��ng)��ʮ�M�Ɣ�(sh��)���ԙ�(qu��n)ֵ�����õĽY(ji��)����VW500��ų��ۼӵĽY(ji��)����VW510��ŵ�����Ч��(sh��)��(j��)λ��λ��ʮλ����λ�Ȍ���(y��ng)�ę�(qu��n)ֵ���ڳ��ۼ��^����Vw510��ֵ�����Ξ�1��10��100��1000�ȣ�VW400��Vw420�ﶼ�������ָ�VD96��ȡ�����ַ���VW410��������ASCII�a�D(zhu��n)�Q��ʮ�M�Ɣ�(sh��)��VW520��������һ��ʮ�M�����y�Ĕ�(sh��)��(j��)��
6�Y(ji��)�Z
�C����������ϵ�y(t��ng)��80 ms�����ڃ�(n��i)�քe���ǶȺ��ٶ�ֵ���ɼ�һ�Σ����������D(zhu��n)�Q��ʮ�M�ƣ���PLc���m(x��)�����ṩ�˔�(sh��)��(j��)��Դ����(j��ng)���`�C�����ɿ��ԡ���(w��n)���Ա��^�ã��܉�M�㌍�r��Ҫ�����^�ߵĹ��I(y��)��(y��ng)�È��ϡ�
|