���T�����Ә����Dʸ���ˑB�����㷨
���ɣ��ΏV��
�������I���I��W������Փ�c�ƌ����g�о����ģ������������I15000��
ժ Ҫ���ˑB�����㷨�ǽ��T�Ԍ���ϵ�y���P�I�㷨��Ŀǰ�ˑB�����㷨�КW���Ƿ�����Ԫ�������������ҷ������Dʸ���������Dʸ�������Բ��ö��Ә��㷨���F�����ɽ��Q�`����a����ᘌ��������ݽ�����ݔ���M���ˑB����Ӌ�㎧���IJ��ɽ��Q���`����]����������ϵ���ˑB�������ڃ����D���^���������c���о��˽��T���ˑB���µ����Dʸ���������㷨���Դ˞���AԔ���ƌ������Әӵ����Dʸ���㷨���ó��������ݽ���������Ч���Dʸ�����@ʽ��ʽ��ԓ�@ʽ��ʽ��ֱ���������ݵ�����ݔ�������ڹ��̌��H�Б��á�
�P�I�~���ˑB���£���Ч���Dʸ�������Әӣ��ˑB����
�ЈD���̖��TP 27 �īI���R�a��A
1����
�ˑB�����nj��r�ؽ���ęC�w����ϵ����������ϵ�ķ������Ҿ�ꇣ��ˑB�����㷨�ǽ��T�Ԍ���ϵ�y���P�I�㷨�����y���ˑB�����㷨�КW���Ƿ����������ҷ�����Ԫ���������У���Ԫ��Ƥ���㷨���Ρ�Ӌ����С������ڹ��̌��H�г����á�����ԓ�㷨�����ɽ��Q�`����a����****���e���\�d�w�߄ӑB�r���@�N�`����Ӈ��ء�����Ч���Dʸ�������@�N�`�������m���a�����e�m���ڸ߄ӑB�ĭh���¹����������ƌ�����������Dʸ���㷨�����ƌ����������Dʸ���M���ˑB����r�������㷨��
2�����Pϵʽ
1)��������׃�Q����Ԫ���˱�ʾ��������׃�Q��ꇱ�ʾ�����������r������r��Rϵ�е�ͶӰ����r6������r��6ϵ�е�ͶӰ���������������Ԫ�����trR��r6��׃�Q�Pϵ�ɲ�����Ԫ����ʽ�У�O��ʾ��Ԫ���ˣ�Q��ʾ��Rϵ��6ϵ�����D��Ԫ����Q 8��ʾ�乲ܗ��Ԫ����
������׃�Q��ꇱ�ʾ������
ʽ�У�cR���bϵ��Rϵ������׃����ꇡ�
2)��Ԫ��������ʽ����Ԫ���ַ���Q=cos��0/2��+URsiri��0/2�����������������w���c�D�ӣ�����ֻ�P��bϵ������ϵ�Ľ�λ�Õr�����J��bϵ����Rϵ���^�o���g�^�̵�һ���Ե�Ч���D�γɣ���˲�r���D�S�����D���Ȟ��D�^�ĽǶȡ�
���治���C���ؽo����Ԫ�����ַ��̣�
3)�ˑB��Ԫ�����������bϵ�����\�d�w�C�w����ϵ��Rϵ�����\�d�w�Č�������ϵn���tQ���\�d�w���ˑB��Ԫ����
3���Dʸ�����ˑB��Ԫ�����Pϵ
�Otk�r�̵ęC�w����ϵ��b(k)����������ϵ��n(k)��tk+1�r�̵ęC�w����ϵ��b(k+1)����������ϵ��n(k+1)��ӛ6(k)��b(k+1)�����D��Ԫ����g(h)��n( k)��b(k)�����D��Ԫ��Q(tk)������tk���r�̵��ˑB��Ԫ����n��kʮ1����b(k+1)�����D��Ԫ����Q(tk+1)������tk=1
���r�̵��ˑB��Ԫ����n(k)��n(k+1)�����D��Ԫ����p(h)�����У�h=tk-1-tk���ˑB�������ڣ�����ʽ(2)�ɵã�
߀���Եõ���
��ʽ(1)���Եõ���ʽ��
����ʽ(1)߀�ܵõ����¸�ʽ��
�����ϸ�ʽ�ɵõ���
��Ԫ���ij˷��Y���ɣ���ʽ���Ԍ�����
���^��ʽ��ʽ(5)�ɵã�
�O�ˑB��������h=tk-1-tk�ȣ���������ϵ��׃���^�������O��������ϵ��׃�Q��Ԫ��p(h)=cos����/2��+uRsin����/2������������Ԫ����ʾ���w�D�ӵ����x�ɵæ�=O������p(h)=1+�ȣ�����ʽ(9)�Ɍ��ɣ�
��ʽ(6)~ʽ(8)��֪���˕r�õ����ˑB��Ԫ�����Ǐ�b(��+1)����ϵ��T(k)����ϵ���ˑB��Ԫ����Ҳ�����f�ˑB���º̵ܶĕr�g���ڃȺ����ˌ�������ϵ��׃���������о�����������ں��Ԍ�������ϵ��׃����������ˑB��ꇵĽ����`�
4�ˑB��Ԫ�������㷨
�ˑB��Ԫ���푪����ʽ(9)�M�и��£����ڌ�������ϵ���ˑB�������ڃ����D���^����������ʽ(10)���M�и��£����ǽ��^�����ˑB�������ں�Ҫ���m�����������������������£�
��ʽ(10)��õ���Q��tk+I�������O����Ӌ������ڞ�tk-1-tk=Mh�����У�h���ˑB�������ڣ�M��ijһ����������ô����ʽ(10)���½��㣺
�˕r�õ����ˑB��Ԫ���������ˑB���,Ҳ���f����r��������ϵ�ĸ��£���ti=1�r�����_���ˑB��ꇑ�ԓ��
��������ϵ��׃�����Ը���������Ƶõ���
���O���������ڃȣ�Mh���ȣ��\�d�w�Ľ��Ⱥ;��ȵ������քe����˺͡�L���Ҿ���С�ǣ��t��������ϵ���@�Εr�g�g��ȵ����Dʸ����
5���Dʸ���ַ��̼������Ә��㷨�о�
1) ���Dʸ�����ַ�����ʽ ��ʽ( 10)��֪���M���ˑB��Ԫ���ĸ��£�ֻҪ�܉�������Dʸ��q(h)�Ϳ����M���ˑB�Č��r���£���q��h���ɵ�Ч���Dʸ���մ_���������ˑB�����}��K�w�Y������Ч���Dʸ����
���治���C���ؽo����Ч���Dʸ�����ַ��̣���****��Borlz���̣�
�����е����Ǯ���չ�_�����Եõ����麆���Ľ��Ʒ��̡�
2)��Ч���Dʸ�������Ә��㷨�о�����ʽ(1l)��ʽ(12)������Dʸ�����T��㣬��Ҫ�ǣ�
�ټ������ݵ�ݔ��һ�������������������������ɽ����ʣ��t�̌��������ص����Ŵ�Ч����
�ڼ�ʹ�܉�õ������ʵ�ݔ��������ʽ(11)��ʽ(12)��ʾ�ַ���Ҳֻ�����䔵ֵ�⣬���Ա�회������ʲɘӣ��@������ˑB�������ڃȁGʧ�˺ܶ���Ϣ��
��ʽ(10)�f�����ˑB����ֻ����r�̣��C�w����ϵ���D�������ĵ�Ч���Dʸ����������Ҫ֪���@���r�g������ʸ�������׃���ġ���ˣ��ɲ���Taylor����չ�_��������Dʸ��[2]��
�O�� (h)��[tk=1��tk]�r�g�ȵĵ�Ч���Dʸ�������У�h =tk+1-tk�ˑB�������ڣ��\�d�w�Ľ��ٶ������Β��タ�M�ϣ�
���У��� [O��h]������ (h)��hһO�M��Taylor����չ�_��
��ʽ(13)����ã�
�t��ʽ(13)��ʽ(14)��
�����ˑB���������e�̣��ɿ����O��С��������ʽ(12)Ӌ����(r)��r=0�r�ĸ��A�����r������ȥ��3헣����ҽ���ʹ�æ�(��)=����(��)���@��ʽ(12)�Ɍ��ɣ�
��ʽ����A�����������]ʽ(15)��ʽ(16)���Եõ������Tʽ������ڕ������Ѧ�nbb(tk+��)������أ��ѡ���(��)���������ȣ���(��)������ա�
��ʽ(17)����A������������ʽ(15)��ʽ(16)���˿��Եõ������Tʽ��
��ʽ(15)��ʽ(16)���������Tʽ��
���Կ��Եõ���
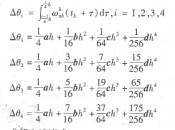
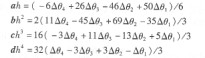
������ݔ��������ʽ�еą�������һ���ˑB�������ڃȌ�����ݔ���M���Ĵβɘӣ�ӛ��
��������Tʽ��
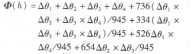
�������ʽ(18)�õ����Ә����Dʸ���㷨��
���ˣ��͵õ��˵�Ч���Dʸ��������ݔ���������g���Pϵ�����r�����Ч���Dʸ�������Ϳ�������ˑB�������ڃ��d�w����ϵ�����D��Ԫ��q(h)��Ȼ�����ʽ(10)�M���ˑB��Ԫ���ĸ��£��Ķ��õ��\�d�w�ˑB�ĸ��¡�
6�Y�Z
���ˑB�������ڃȣ����������Β��タ��M���\�d�w�Ľ��ٶȣ��õ������Dʸ�����Ә��㷨�����H�ϲ��ò�ͬ�ĺ�����M���\�d�w�Ľ��\�ӣ��͛Q�������Dʸ��������ӘӔ������������Β��タ��M���\�d�w�Ľ��\�ӣ������������Ә��㷨��
�\�d�w�Ľ��\�Ӿ��кܴ�������ԣ�����ijһ�ض�������M��������������һ���Ľ����ԣ��ڌ��H����ϵ�y�����^���У���ԓ�����\�d�w�\�����ԁ��x���ӘӔ���Ҳ�����ھ��Ⱥ͌��r���g�M�������x�����\ݔ�C���Zը�C��Ş���Ƚ��\�ӱ��^�������\�d�w�����Ә��㷨���M���䌧�����ȵ���Ҫ��������һЩ���_�ƌ�ʽ�����Ȅt��Ҫ���Ә��㷨��
|