|
������ �����i ��� (�����I���I(y��)��W(xu��)150001)
��ժ Ҫ��Փ���������(q��)��(d��ng)���g(sh��)���@����߲��M(j��n)늄�(d��ng)�C(j��)�ڵ����\(y��n)�Ѕ^(q��)���ٶȵ�ƽ��(w��n)�ԣ������(q��)��(d��ng)ϵ�y(t��ng)�Č�(sh��)��������ý��ٶ�׃�������_�������׃��Ҏ(gu��)�ɺ�������`����·�����
1 �� ��
���M(j��n)늄�(d��ng)�C(j��)�������(q��)��(d��ng)���g(sh��)���������늄�(d��ng)�C(j��)�ķֱ������⣬����Ҫ��Ŀ���Ǟ���������D(zhu��n)��(d��ng)�ľ����ԡ���Ҏ(gu��)�IJ��M(j��n)늄�(d��ng)�C(j��)ϵ�y(t��ng)�ڵ����\(y��n)�Еr(sh��)�������@�IJ��M(j��n)�С���һ�����ֳɺܶ�С�����D(zhu��n)��(d��ng)�ľ�������ȻҪ��ߣ����ǣ����(q��)��(d��ng)�IJ��M(j��n)늄�(d��ng)�C(j��)ϵ�y(t��ng)����ٶȷ�(w��n)�����к����c(di��n)���c��(x��)��?j��n)?sh��)��ʲô�P(gu��n)ϵ�����ٶȷ�(w��n)�������_(d��)��ʲôˮƽ��߀����Щ���ص�Ӱ푺����Ƶ�һϵ�І�(w��n)�}���б�Ҫ������������ڑ�(y��ng)��ϵ�y(t��ng)���O(sh��)Ӌ(j��)�����_���ò��M(j��n)늄�(d��ng)�C(j��)�����(q��)��(d��ng)���g(sh��)��ͬ�r(sh��)Ҳ���O(sh��)Ӌ(j��)����������Ҫ�˽�����յġ�
�������Ҋ(ji��n)�������������ĸ�����нo��һ��(g��)���(q��)��(d��ng)ϵ�y(t��ng)�Č�(sh��)����
2�l�ּ����ٶȲ���(d��ng)�����c(di��n)
���M(j��n)늄�(d��ng)�C(j��)��ƽ���D(zhu��n)���c�����}�_�l��(fcp)�����ȣ��c߉ͨ늠�B(t��i)��(sh��)(M)���D(zhu��n)���X��(sh��)(Zr)�ɷ��ȣ���
ƽ���D(zhu��n)�٣�
��ƽ�����ٶȣ�
ʽ��m����������ʽ��߉ͨ늠�B(t��i)��(sh��)��
ͨ����������(sh��)
n1������������������(sh��)������(x��)��?j��n)?sh��)
���M(j��n)늄�(d��ng)�C(j��)�\(y��n)�Еr(sh��)������(j��)���\(y��n)��(d��ng)��ʽ�����c(di��n)���Ɍ�����(g��)�l��ֳ������l�Ρ����͵Ą����nj�����(g��)�l��֞�O���l�����l���l��
2��1�O���l
�������}�_�����ڻ��g���r(sh��)�g����ֹͣ�r(sh��)�g(ts)���l��늄�(d��ng)�C(j��)ÿ��һ�����džβ�푑�(y��ng)�^(gu��)�̣�늄�(d��ng)�C(j��)������Ȼ�l����ʎ��˥�p���oֹ����ʽ(2)��늄�(d��ng)�C(j��)��ƽ�����ٶȺ�С��������������ʎ�^(gu��)����****���ٶȿ����_(d��)���ஔ(d��ng)���ֵ����(sh��)�H��������ʎ�^(gu��)��������Ӌ(j��)˥�p��****���ٶȵ�ֵ�飺
��Ҋ(ji��n)����ԓ�l���(n��i)늄�(d��ng)�C(j��)�Ľ��ٶȲ���(d��ng)�ܴ���������****ֵ��ؓ(f��)��****ֵ֮�g׃����
2��2���l
���@��(g��)�l��(n��i)�������}�_���g���r(sh��)�g��ֹͣ�r(sh��)�gС���β��Ľ��ٶ���ʎ����˥�p���㡣���ǿ����}�_���g���r(sh��)�g��������ʎ���ڵ�Ҫ�L(zh��ng)������һ�����^(gu��)�_���{(di��o)�����@��(g��)�l��(n��i)����(d��ng)늄�(d��ng)�C(j��)�r(sh��)���ڶ����ij�ʼ�l�����^��(f��)�s���ڲ�������r�¿��ܮa(ch��n)�����@����ʎ������
fcp=f0 (6)
�@��ͨ�����f(shu��)�ĵ��l�����c(di��n)��
2��3���l
���@��(g��)�l��(n��i)�������}�_������С��������ʎ���ڵ�1��4���������@һ�l��(n��i)늄�(d��ng)�C(j��)����(d��ng)�r(sh��)����һ���Ľ�λ�ƿ϶�����(hu��)���^(gu��)һ��(g��)����ǣ����a(ch��n)������Ą�(d��ng)�B(t��i)�`�늄�(d��ng)�C(j��)�B�m(x��)��(w��n)�B(t��i)�\(y��n)�Еr(sh��)��Ҳ�Ͳ���(hu��)�в��M(j��n)���X(ju��)�����ǰ�
fcp=f0 (8)
���鲽�M(j��n)늄�(d��ng)�C(j��)�M(j��n)����l�\(y��n)���l��ķֽ羀��Ҳ���Dz��M(j��n)늄�(d��ng)�C(j��)�M(j��n)����^�B�m(x��)ƽ��(w��n)�\(y��n)����ķֽ羀����ԓ�l�ʛQ����늄�(d��ng)�C(j��)��ƽ�����ٶȞ飺
��һ�_(t��i)���͵�������ʽ���M(j��n)늄�(d��ng)�C(j��)��
������������(sh��)��m=4���D(zhu��n)���X��(sh��)zr=50������Ȼ�l��f0=100Hz����ͨ��������ʽ���\(y��n)�У�����ʽ(9)�ã�
�����f(shu��)���@�N���͵IJ��M(j��n)늄�(d��ng)�C(j��)ϵ�y(t��ng)��ֻ�����D(zhu��n)�ٸ���120r��min�r(sh��)���M(j��n)���B�m(x��)ƽ��(w��n)�\(y��n)�Ѕ^(q��)�������@�_(t��i)늄�(d��ng)�C(j��)�ڵ�100r��min����͵��D(zhu��n)��ƽ��(w��n)�\(y��n)�У���������(q��)��(d��ng)���g(sh��)����(x��)��?j��n)?sh��)����ʽ(9)�M(j��n)���B�m(x��)ƽ��(w��n)�\(y��n)�е�ƽ���ٶ����͡�������늄�(d��ng)�C(j��)ȡ��(x��)��?j��n)?sh��)n1=1024���t��
���D(zhu��n)�ٽ���8��5min�D(zhu��n)lr�Ԍ��B�m(x��)ƽ��(w��n)�\(y��n)�������⣬��ʹ�ژO���l���B�m(x��)�\(y��n)�����ٶȵIJ���(d��ng)Ҳ�S����(x��)��?j��n)?sh��)��������@���pС���@�r(sh��)���ٶȲ���(d��ng)�ĘO��ֵ��ʽ(4)��ʾ�����c����dz����ȣ������f(shu��)�c��(x��)��?j��n)?sh��)�ɷ��ȡ�
3��(sh��)�(y��n)�о�
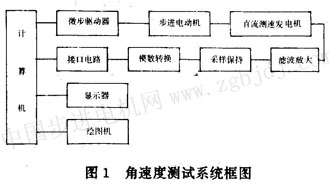
��(sh��)�(y��n)�b����һ���ٶȜy(c��)ԇϵ�y(t��ng)�����D��D1��ʾ��
��ԇ늄�(d��ng)�C(j��)���ɹ�����ŷ����g(sh��)�о������ƣ��������(q��)��(d��ng)ϵ�y(t��ng)��ԓ늙C(j��)��68BYG2102�Ͷ�����ʽ���M(j��n)늄�(d��ng)�C(j��)���������g(sh��)��(sh��)��(j��)�飬�D(zhu��n)���X��(sh��)Zr=102�����@�M���R=50�����o�B(t��i)�����I=0��3A�������D(zhu��n)��Tk��0��6Nm�������(q��)��(d��ng)��Ҳ�ǹ��������ƵĶ���늄�(d��ng)�C(j��)���(q��)��(d��ng)������(x��)��?j��n)?sh��)��׃��nl=1��2��4��������526��1024��
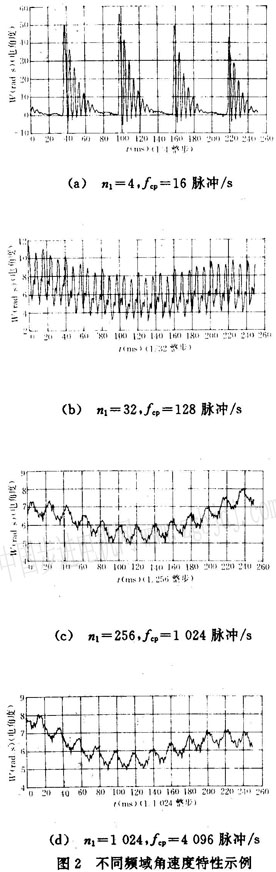
�D2��ʾһ�M���ٶȲ��εĜy(c��)ԇ�Y(ji��)�����y(c��)ԇ�r(sh��)����늄�(d��ng)�C(j��)��ƽ�����ٶȲ�׃����250ms��n1���������f(shu��)0��25s��һ������1��4�X�࣬ƽ�����ٶȵ�ֵ�飺
�D2a��O���l��r�½��ٶȲ��ε�ʾ�����D�п��Կ��������ٶ�������ʎ�����ڴ�
�s�飬T0=5ms����������Ȼ�l�ʞ飺
��������������ʎ��ֹͣ�r(sh��)�g��s��
Ts=40ms���Dla��(du��)��(y��ng)����nl=4��fcp=4nl=16��
���ژO���l�������Ͽ��Կ������ٶ�****ֵ�_(d��)��
 =56 rad��s(늽Ƕ�)=0��549 rad��s�s��ƽ�����ٶȵ�9����
�D2b��(du��)��(y��ng)�ڣ�nl=32��fcp=128�}�_��s��
���ڵ��l�l���ٶȲ���(hu��)˥�p���oֹ���������^���@����ʎ������
�D2c�͈D2d�քe��(du��)��(y��ng)�ڣ�nl=256��fcp=1 024�}�_��s��nl=1 024��fcp=4 096�}�_��s�������ڸ��l�l��늄�(d��ng)�C(j��)�M(j��n)���B�m(x��)ƽ��(w��n)�\(y��n)�����ٶȲ����Л](m��i)��������ʎ����(d��ng)��Ӱ푡���(y��ng)ָ�����ǣ��D�������@ʾ��С�IJ���(d��ng)�ǜy(c��)ԇϵ�y(t��ng)��������ɵģ����������@�Ĺ��l�ɔ_����������Ӌ(j��)�@Щ���l�ɔ_Ӎ̖(h��o)���ɿ������ٶ�Ҳ��һЩ����(d��ng)����һ����������(n��i)��s׃��һ��(g��)���ڣ�����(du��)��һ��(g��)�X���׃�����ڳ�4���C�����������@�r(sh��)���ٶȲ���(d��ng)��****ֵ��С������ʾ�������У�
 ��7��5 rad��s(늽Ƕ�)һO��073 5rad/s
 ��5��5 rad��s(늽Ƕ�)=0��053 9rad/s
���^�D2c�͈D2d������������ȫ��ͬ����Ҋ(ji��n)����(du��)��ijһƽ�����ٶȣ�һ�����(x��)��?j��n)?sh��)��ʹcp�}�_��ߵ����l�l��늄�(d��ng)�C(j��)�Ľ��ٶȱ�څ��ƽ��(w��n)�����M(j��n)һ�����(x��)��?j��n)?sh��)�r(sh��)�����ٶȵIJ���(d��ng)����(hu��)�M(j��n)һ���pС�����^(gu��)�����(x��)��?j��n)?sh��)��(du��)��߽��ٶȷ�(w��n)���ț](m��i)��ʲô������
�����ϵĽY(ji��)�����Եõ�һ�c(di��n)��Փ����(du��)�ڽ��ٶ��^�ߵ��\(y��n)����ȡ������ʽ��̎�ڸ��l�l��Ĉ�(ch��ng)�ϣ��������(q��)��(d��ng)��(du��)��߽��ٶȷ�(w��n)���Ȳ���(hu��)��ʲôЧ����
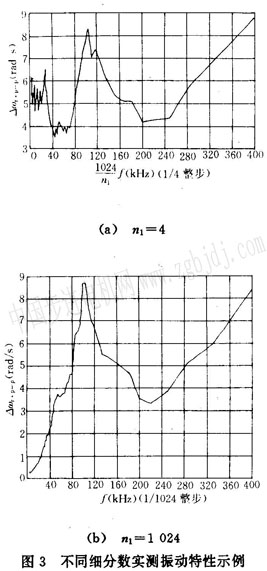
�D3�Č�(sh��)�(y��n)�����ɱ����@��(g��)�Y(ji��)Փ���D3b��(du��)��(y��ng)��n1=l 024���ȈD3a��(x��)��?j��n)?sh��)��ö࣬�����(d��ng)���Կ��������ٕr(sh��)������f<40k�}�_��s������(n��i)�����ٶȲ���(d��ng)�ķ��ֵ(  )�@���pС�������^���D(zhu��n)�ٷ�����(n��i)�����ٶȲ���(d��ng)��ֵ���](m��i)��׃������ȡ���(q��)��(d��ng)���g(sh��)���@����߲��M(j��n)늄�(d��ng)�C(j��)�����\(y��n)�е�ƽ��(w��n)�ԡ� �D2c��b���������(q��)��(d��ng)늄�(d��ng)�C(j��)���ٶȳ�4���C��������������һ��(g��)�X�����׃4��(g��)���ڡ�Ȼ����һ��(g��)�X�����(n��i)�ߵIJ���(sh��)�ܶ࣬����n1=l 024�r(sh��)һ��(g��)�X��Ҫ��4 096������Ҋ(ji��n)����(du��)���߲��}�_���ԣ����ٶȵIJ���(d��ng)��׃����һ��������(n��i)���J(r��n)����ٶȲ�׃�����ɽ��Ƶؿ���һ�N��(zh��n)��(w��n)�B(t��i)�\(y��n)�У��Ɍ�(xi��)�ɣ�
��ʽ��������fcp�㶨�r(sh��)�����ٶȵIJ���(d��ng)���ɲ���ǵ�׃��(d��ng)����������`������ġ���֮�����ٶȵIJ���(d��ng)��ӳ�˲���ǵ�׃����
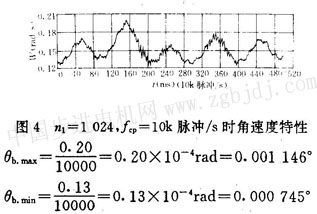
�ԈD4��ʾ��(sh��)�y(c��)�Ľ��ٶ������������ĈD�пɵý��ٶȵ�****ֵ�s��  =0��20rad��s����Сֵ�s��  =O��13 rad��s������(y��ng)�ؿɵò���ǵ�****ֵ����Сֵ�飺 ����ǵ�ƽ��ֵ��
 =0��15��10 -4=0��000 862 o
����������`��飺
 =+O��000 278 o��-0��000 117 o
�@������ǜy(c��)ԇ���ýY(ji��)������һ�¡�
4�Y(ji��)Փ
a�����(q��)��(d��ng)���@����߲��M(j��n)늄�(d��ng)�C(j��)�����\(y��n)�Ѕ^(q��)���ٶȵ�ƽ��(w��n)�ԡ���(du��)�����\(y��n)������ٶȵķ�(w��n)���ԛ](m��i)�����@��Ӱ푡�
b�����(q��)��(d��ng)ϵ�y(t��ng)�����\(y��n)�D(zhu��n)�ľ�������Ҫ������ǵľ����ԛQ������(du��)������(����)늄�(d��ng)�C(j��)���pС4���C���D(zhu��n)�ص�Ӱ푺���Ҫ��
c���o�����ý��ٶ�׃�������_�������׃��Ҏ(gu��)�ɺ�������`����·�����
�����īI(xi��n)
1 �����I���I(y��)��W(xu��)���ɶ�늙C(j��)�S�� ���M(j��n)늙C(j��)���������ƌW(xu��)�����磬1979�� 2�����࣮ ���M(j��n)늙C(j��)���(d��ng)���Ե��C(j��)�y(c��)ԇϵ�y(t��ng)��늹����g(sh��)�s־��1993(5) 3�����࣬�����i����꣮���M(j��n)늄�(d��ng)�C(j��)����ǵĜy(c��)������늙C(j��)��1995��
|