|
������ �����壨�����I���I(y��)��W(xu��)��
��ժ Ҫ�������U�� ���M(j��n)늙C(j��)�����(q��)��(d��ng)ԭ������(sh��)�F(xi��n)���g(sh��)��Ȼ��������(q��)��(d��ng)λ���]�h(hu��n)���Ƶ�ԭ�������Ƴ������̣�����B��8031��Ƭ�C(j��)��(g��u)�ɵĿ����������o��ԇ�(y��n)�Y(ji��)���� ���� �~�����M(j��n)늄�(d��ng)�C(j��)�����(q��)��(d��ng)λ���Ԅ�(d��ng)���ƣ��]�h(hu��n)���Ɔ�Ƭ�͙C(j��)
1����
���M(j��n)늙C(j��)��Ҫ�з���(y��ng)ʽ������ʽ�����ʽ��3�N��ͣ��䃞(y��u)�c(di��n)�ǣ���(sh��)��ʽ���ƣ��ɱ��ͣ����D(zhu��n)�ӑT�����oƯ�ơ��o�۷e��λ�`���Ѹ�ټӜp�ٺ�ͣ�C(j��)������ʽ�ͻ��ʽ��ͣ늕r(sh��)���^�߶�λ�D(zhu��n)�ء���Ҫȱ�c(di��n)�ǣ��D(zhu��n)�QЧ�ʵͣ�����С���ֱ��ʵͣ��ٶȵͣ��ЁG���F(xi��n)��͵��l��ʎ�F(xi��n)��
�S�����M(j��n)늄�(d��ng)�C(j��)��Ӌ(j��)��C(j��)���Ƽ��g(sh��)�İl(f��)չ�����M(j��n)늄�(d��ng)�C(j��)�Ĺ������ܵõ��ܴ���ߡ������g(sh��)��ʹÿ����(x��)�ֳ�125������ࡣ�]�h(hu��n)���Ƽ��g(sh��)����˲��M(j��n)늙C(j��)��λ�ÿ��ƾ��ȡ��\(y��n)�з�(w��n)���Ժ�ƽ��ݔ��Ť��[2]��
��(microstep)�ĸ�������70�����������ġ��M(j��n)�����о�[3 4]������(sh��)�ͻղ�������Ҫ�ɿ������Ͳ��M(j��n)늄�(d��ng)�C(j��)�����ԛQ������ ������x����2�N�������ٻ����D(zhu��n)��һλ���������ڻ��ڰ��B�m(x��)�Ĵň�(ch��ng)�xɢ����
���M(j��n)늄�(d��ng)�C(j��)�]�h(hu��n)���Ʒ�����Ҫ�к˲���λ���]�h(hu��n)���ƺͳ�ǰ���ٶ��]�h(hu��n)���ơ�
2���(q��)��(d��ng)���g(sh��)
��(sh��)Ns=8���D(zhu��n)���X��(sh��)Nr=6���tÿ�D(zhu��n)����(sh��)�飺
���ؽǞ飺
R=360��/N=15��
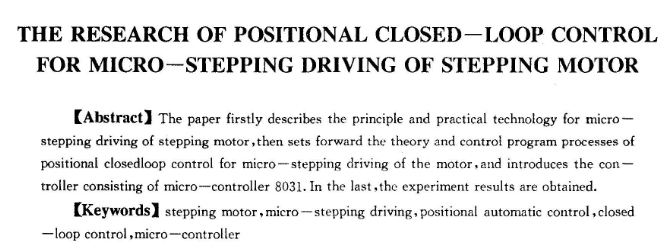
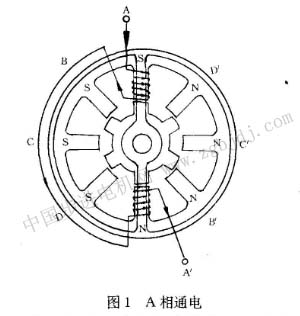
��(d��ng)A��ͨ늕r(sh��)���D(zhu��n)��ͣ���cA�ඨ�ӌ�(du��)��(zh��n)�Ġ�B(t��i)��Ҋ�D1����(d��ng)A��ͨ��D(zhu��n)��B��ͨ늕r(sh��)�D(zhu��n)����r(sh��)��D(zhu��n)�^15�ȡ���(d��ng)A��ͨ��D(zhu��n)��AB��ͨ늕r(sh��)��Ҋ�D2�����D(zhu��n)����r(sh��)��D(zhu��n)�^7.5�ȣ���λ��AB�����g��һ��(g��)�ƽ���c(di��n)����(d��ng)B��ͨ늕r(sh��)�������������ֱ�������~��ֵIB�����ǰ���ֳ�n��(g��)��λ�����
2.1���M(j��n)늙C(j��)���(q��)��(d��ng)ԭ��
�D1 A��ͨ�ʹB������S�@��(g��)�A���f����ͨ늠�B(t��i)��(du��)�ڈD1��ʾ���� ���M(j��n)늙C(j��)�������X��׃���飺
��ô�D(zhu��n)�ӌ���ÿ��(g��)����B(t��i)AB,�_(d��)��һ��(g��)�µ��ƽ���c(di��n)��ABi�cABf��֮�g����(g��u)��һ����A��������^���е����^�̞飺
�t�������(q��)��(d��ng)�IJ���ǹ�ʽ�飺
ʽ��n-����(sh��)��N����ÿ�D(zhu��n)����(sh��)
2.2���(q��)��(d��ng)���g(sh��)��(sh��)�F(xi��n)
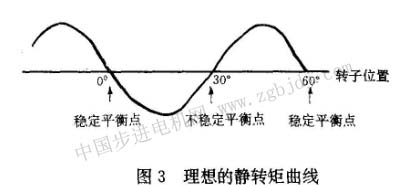
���(q��)��(d��ng)���g(sh��)��(sh��)�F(xi��n)���P(gu��n)�I�Ǹ����@�M������x��һ�㰴�o�D(zhu��n)��λ�������x����������nj�(sh��)�H�IJ��M(j��n)늄�(d��ng)�C(j��)�o�D(zhu��n)��λ�����������LjD3��ʾ�������������������⣬��������o�D(zhu��n)�ص��P(gu��n)ϵҲ���ܾ��_��������ˣ����ˌ�(sh��)�H���\(y��n)�ú�Ӌ(j��)��C(j��)�������ı�����һ���������������������ؽǵIJ������@��ͨ�^�����ֶ��M(j��n)�и��ơ�
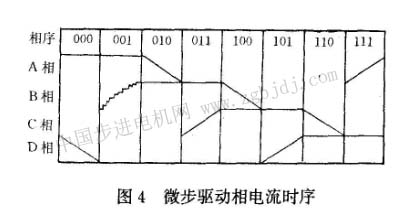
���Č�(sh��)�(y��n)ϵ�y(t��ng)�еIJ��M(j��n)늄�(d��ng)�C(j��)�����C(j��)���˵�ijһ�P(gu��n)��(ji��)�(q��)��(d��ng)��������������ʽ���M(j��n)늄�(d��ng)�C(j��)�����ؽ�1.8�ȣ�����ͨ����(q��)��(d��ng)�r(sh��)�������������Ҋ�D4��
��(d��ng)늙C(j��)ͨ�ԈD4��ʾ�������ҵĸ�������r(sh��)�����M(j��n)늄�(d��ng)�C(j��)형r(sh��)����\(y��n)�С�׃�����A�������(du��)��(y��ng)�Ĕ�(sh��)��ֵ����E��PROM�У����IJ��ð�λD/A�D(zhu��n)�Q���ʔ�(sh��)��(j��)������0��255������(sh��)Ҳ��1��255����(sh��)�(y��n)ϵ�y(t��ng)�н�����1��5��10��25��50��100��200��255�I8�N����(sh��)����С�IJ��؞飺
2.3���(q��)��(d��ng)�·
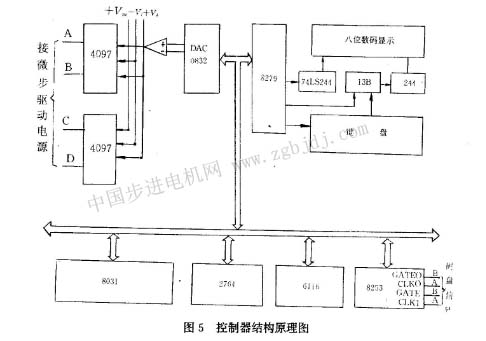
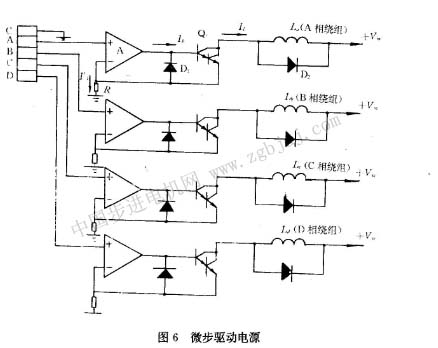
���(q��)��(d��ng)��ܛӲ�����нY(ji��)�ϵļ��g(sh��)�����(q��)��(d��ng)�·�ĺ��İ���D/A�D(zhu��n)�Q�·���g�a�xͨ�·�͉��غ����Դ����Ƭ�C(j��)�����·ԭ��Ҋ�D5�����(q��)��(d��ng)�Դ�·Ҋ�D6��
������ݔ����ͬ�Ĕ�(sh��)��(j��)�oD/A�D(zhu��n)�Q�·��ͨ�^���غ����Դ���ԫ@���A���������- Vref������늉�����׃����������DAC�D(zhu��n)�Q��ݔ��늉��������Ķ�Ҳ�����˲��M(j��n)늄�(d��ng)�C(j��)���\(y��n)������������䃞(y��u)�c(di��n)�Dz����{(di��o)��(ji��)���(q��)��(d��ng)�Դ�е��������������\(y��n)�������****ֵ���Ķ������˶���Ĺ��ʓp�ġ�
�D5�в����c8031��ȫ���ݵ�8253�M(j��n)��Ӌ(j��)��(sh��)��8253��3��(g��)16λ���r(sh��)����Ӌ(j��)��(sh��)������C/T0Ӌ(j��)�a�P형r(sh��)ᘵ��}�_��(sh��)��C/T1Ӌ(j��)�a�P��r(sh��)ᘵ��}�_��(sh��)������r(sh��)���V�i�����M(j��n)���w�x����(j��ng)����ܛ��̎�����ɫ@������(du��)�����c(di��n)****λ�á�
4097���p·��ͨ��ģ�M�_�P(gu��n)���xͨ��A��B��C�քe��8031��P1.0��P1.1��P1.2��ӡ�ݔ�����3�N늉���-VL��+Vh��+Vm��-VL�Ǹ߽�ֹ늉���ؓ(f��)����ͨ-VL���������㣻 ��ͨ+Vh��������****��+Vh����{(di��o)���c +Vm��****ֵ����һ�£�+Vm��D/A�D(zhu��n)�Q��ݔ������ͨԓ���γ��A��������錍(sh��)�F(xi��n)�D4����������ΈD��ģ�M�_�P(gu��n)�xͨ�����總����ʾ���D6�����(q��)��(d��ng)�����Դ���\(y��n)��Ŵ���A���_(d��)���D���O��Q1���������R��(g��u)��һ�������Դ��늙C(j��)�@�MLa��A�ķ����h(hu��n)�⣬���P(gu��n)ϵ�飺
�ڷ����h(hu��n)��(ji��)�У���������Ϳ���ؓ(f��)�d������һ���O�����
ʽ��HFE-Q1�Ą�(d��ng)�B(t��i)�Ŵ�(sh��)
��ˣ��x�ø߷Ŵ�(sh��)���_(d��)���D���Źܿ����������ƾ��ȡ�
3���(q��)��(d��ng)��]�h(hu��n)����
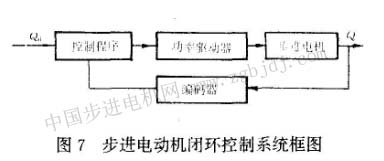
���M(j��n)늄�(d��ng)�C(j��)�ǔ�(sh��)��ʽ�(q��)��(d��ng)�������������;��зe���a(b��)�����ã����λ�ÿ��ƕr(sh��)�]���۷e�`����M(j��n)늄�(d��ng)�C(j��)λ���]�h(hu��n)���ƿ�DҊ�D7��
���IJ��ú˲�����(sh��)�F(xi��n)���(q��)��(d��ng)λ���]�h(hu��n)���ƣ��˲���ԭ�����ù�늾��a�����������D(zhu��n)�ǂ���������ݔ����̖(h��o)Ӌ(j��)�㲽�M(j��n)늄�(d��ng)�C(j��)���۷e����(sh��)���������M(j��n)���Д࣬��(d��ng)���M(j��n)늄�(d��ng)�C(j��)���\(y��n)������(sh��)����ָ������(sh��)�r(sh��)��ֹͣ�\(y��n)�л��\(y��n)���µ�ָ��ֵ�����(q��)��(d��ng)λ�ÿ��ƾ��ȿ����_(d��)��0.5��(g��)����ǣ����кܺõķ�(w��n)���ԡ���(sh��)�(y��n)ϵ�y(t��ng)�еIJ��M(j��n)늄�(d��ng)�C(j��)�������^�ߣ�ͬ�r(sh��)��Ҫ��늴a�P��ƥ��ľ��ȡ�
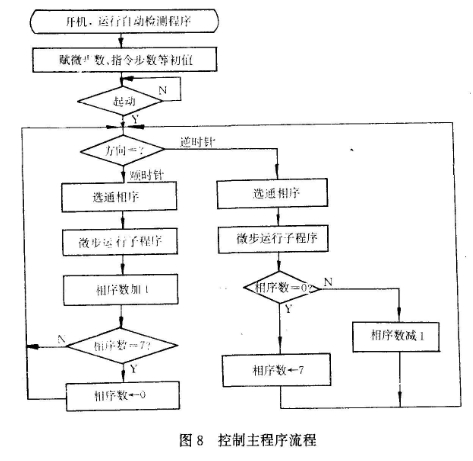
���(q��)��(d��ng)λ���]�h(hu��n)��������������Ҋ�D8��ܛ���O(sh��)Ӌ(j��)Ҫ�M����(ji��n)��,��t��Ӌ(j��)��r(sh��)�g�^�L(zh��ng)��Ӱ푲��M(j��n)늙C(j��)��****�\(y��n)���l�ʡ�
4�Y(ji��) Փ
����(j��)�C(j��)���˄�(d��ng)�B(t��i)ƽ�⌍(sh��)�(y��n)ϵ�y(t��ng)��Ҫ���M(j��n)늙C(j��)������(sh��)��50�Ġ�B(t��i)���\(y��n)�У���늴a�P5 0 0 0�}�_/r���_(d��)��λ�ÿ��ƾ���0. 036�ȣ���3r/min�ĵ����\(y��n)�Еr(sh��)�]�г��F(xi��n)��ʎ�F(xi��n)��
ͨ�^�о����ɵó��Y(ji��)Փ���Æ�Ƭ�C(j��)���O(sh��)Ӌ(j��)�����`��IJ��M(j��n)늄�(d��ng)�C(j��)����������(sh��)�F(xi��n)���M(j��n)늄�(d��ng)�C(j��)���(q��)��(d��ng)λ���]�h(hu��n)���ƣ��Ķ������߲��M(j��n)늄�(d��ng)�C(j��)��λ�ÿ��ƾ��Ⱥ͵��l�\(y��n)�����ܣ��ڙC(j��)���ˡ���(sh��)�ؙC(j��)���Ȉ�(ch��ng)�ϣ��ЏV���đ�(y��ng)��ǰ����
�D8��������������
������;���M(j��n)늄�(d��ng)�C(j��)
ӡ�ȵ�SRI Katragadda�������˾����Ƴ��IJ��M(j��n)늄�(d��ng)�C(j��)������8�N����ͺ������ͮa(ch��n)Ʒ��ÿ���ܼ���(l��)�㲽����(sh��)�ɲ����D(zhu��n)��1mNm��10Nm����(zh��n)�_��С�ڡ�0.005�ȡ�
����ƺ��g1993��2��
|