�o�ٶȷ���ʸ������׃�l�{(di��o)��ϵ�y(t��ng)
�� �h���㽭��W(xu��)����310027��
κ �ࣨ�������ԁ�ˮ��˾��
ժ Ҫ ��B��һ�Nȫ��(sh��)�ֻ�������ͨ��׃�l�{(di��o)��ϵ�y(t��ng)��ԓϵ�y(t��ng)�ԟo�ٶȂ�����ʸ�����Ƽ��g(sh��)������Փ���A(ch��)���Ԇ�Ƭ�C80C196KC��DSP TMS320c2s������ƺ��ģ�����IPM���ܹ���ģ�K���鹦��Ԫ���M�ɽ�һֱһ��늉�����׃����·���yԇ�Y(ji��)��������ϵ�y(t��ng)���Ѓ�(y��u)���Ąӡ��o�B(t��i)���ܡ�
�� �~ ׃�l��ʸ�������C����
1 �� ��
ͨ����ʸ������ϵ�y(t��ng)���ٶȂ�������һ����ù�늴a�P���DZز����ٵģ������ڳɱ����ɿ��Ժ����h(hu��n)����ԭ����Щ��r�o�����b���o�ٶȷ���ʸ������ͨ��׃�l���������κ��ٶșz�y�������ڱ��ֳ�Ҏ(gu��)׃�l���`��㡢�ɿ��ȃ�(y��u)�c��ǰ���£��o�������^���Ӳ���ɱ��������ܽӽ�ʸ�����ƣ��ܿ˷�����׃�l�{(di��o)��ϵ�y(t��ng)�д��ڵ�ȱ�c������H�ϸ�����ͨ��׃�l���ij�����Ҳ�Ǯ�(d��ng)ǰ���������о����c֮һ��
ͨ��׃�l�{(di��o)����һ����ú㉺���l�ȵ��_�h(hu��n)���ƣ��y�ԫ@�����õ��{(di��o)�����ԣ����ڵ��l�^(q��)���ز��㣬ؓ�d�r�ٶ�׃�ӴӑB(t��i)����Ƿ�ѣ���(y��ng)�È����ܵ����ơ��҂��ݽoɽ�|ij��λ�{(di��o)ԇ- PVC���a(ch��n)���r�������@Щ���}�����Q���}���҂��Q���_�l(f��)�o�ٶȷ���ʸ��������ͨ��׃�l����(y��ng)�����@һ���a(ch��n)�����{(di��o)��ϵ�y(t��ng)��ԓϵ�y(t��ng)���õ����D(zhu��n)�Ӵ�ͨ����ʸ�����Ʒ��Ķ���������Ɣ��늙C�D(zhu��n)���γ�ͬ�����D(zhu��n)��̖���M���D(zhu��n)�ٷ���������ܛ����(g��u)���D(zhu��n)�������������·����ͨ�õĽ�һֱһ����׃���Y(ji��)��(g��u)���������������ܹ���ģ�KIPM�����ƺ��Ğ�Inte180C196KC��Ƭ�C��TMS320C25��̖̎�������p�C�IJ���ͨӍ����ͨ�^�p��RAM���F(xi��n)���yԇ�Y(ji��)��������ԓϵ�y(t��ng)���п��ƾ��ȸߡ��{(di��o)�ٷ�������푑�(y��ng)�ٶȿ�����c��
2 �o�ٶȂ�����ʸ������ԭ��
���� 늙C��ʸ��������ͨ�^����(bi��o)׃�Q����������ֽ���D(zhu��n)������̈́��������������քe�M�п��ƣ��ٽ�(j��ng)�^��׃�Q�����_����ֱ���Cһ�ӵĿ��Ʒ�ʽ�����ܡ����F(xi��n)ʸ�����Ƶ��P(gu��n)�I������ȡ����(bi��o)׃�Q����Ĵň����� 2-1�D(zhu��n)�Ӵ�朶����ʸ������ԭ��
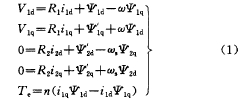
��ϵ�y(t��ng)���õ����D(zhu��n)�Ӵ�朶������_�h(hu��n)ʸ�����Ʒ���[2]���ڴň�����ʸ�������У���(d��ng)��������(bi��o)ϵd-q�S����ͬ�����D(zhu��n)�ň��Еr�����ཻ������늄�
�C�ĄӑB(t��i)��(sh��)�W(xu��)ģ�Ϳ������·��̱�ʾ��
����������(bi��o)ϵ�Ĵ��S�����D(zhu��n)�Ӵ�朷����ϣ���ȡ�D(zhu��n)�Ӵ�朶��������D(zhu��n)�Ӵ���_�h(hu��n)���ƣ�����(d��ng)�D(zhu��n)�Ӵ�朞鳣��(sh��).��O�r����(1)�ɺ����飺
�ɴ˵õ��o�ٶȷ���ʸ������ԭ��D���D1A���֣���
2.2�D(zhu��n)��������
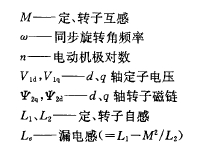
�D1��B���־����D(zhu��n)���������������^�̺��D�������û���������������ٸ߾���AlDоƬ�z�y����������ٽ�(j��ng)���࣯��������(bi��o)׃�Q�����D(zhu��n)�Q��늙C��d-q�S�������(j��ng)�a���·�M���a���\���Ԝp�pd�S���׃�������������ɵ�Ӱ푣����ú����ֵ����(j��ng)�D(zhu��n)��������������늙C���D(zhu��n)�١��D(zhu��n)���������ľ��w����ԭ�����£�
��ʽ(2)�еĮ���늄әC���D(zhu��n)�ع�ʽ֪��
����ʸ�������µ�늙C�D(zhu��n)��һ�D(zhu��n)��(T-N)����������֪��
�@�Ӿ͵õ�늙C�D(zhu��n)�ٵ�������㹫ʽ��
�@�K(i=1��2��3)�鳣��(sh��)�����w�Ʌ�Ҋ�īI[3]���@�ӣ��{(di��o)��(ji��)�D(zhu��n)��������������ͷe�֕r�g����(sh��)��ʹ����ģ���c���H늄әC�\����rһ�£����늙C���D(zhu��n)�١����ε��v�����D(zhu��n)�����׃�����ķe�ֿ��Է�ӳ늄әC���D(zhu��n)�٣��D(zhu��n)���������������������e���\�㌍�F(xi��n)�D(zhu��n)���Ɯy��
������������֪��늄әC�D(zhu��n)�ٵ�����ֻ��z�y������������ڌ��o�����c�����ஐ���C���v�����������֮�͞��㣬����ֻ��z�y�����������֪��ȫ�����������Ϣ�����⣬����d�S�����ָ��ֵ�c����ֵ�g�IJ�ֵ��g�S����M���a���\�㣬��Ŀ���ǽ�Q�D(zhu��n)�Ӵ�朶����_�������������ʧЧ��
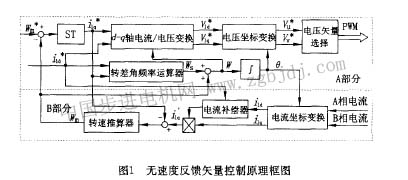
2.3�o�ٶȷ���ʸ������ϵ�y(t��ng)�Ę�(g��u)��
�D1��A��B�ɲ��֘�(g��u)�������o�ٶȷ���ʸ������ϵ�y(t��ng)�����У�ST���ٶ��{(di��o)��(ji��)�����ٶ�ָ���c�����D(zhu��n)�����������ٶȷ�����̖���^�������ٶ��{(di��o)��(ji��)��ST��ݔ�롣ST������������cPI������Y(ji��)�ϵ��pģʽ��ʽ�����ٶ��`���^��r����������ƣ�ʹϵ�y(t��ng)��****�ļ��ٶ������`���(d��ng)�ٶ��`���^С�r���{(di��o)��(ji��)���Ԅ��D(zhu��n)��PI�{(di��o)��(ji��)��ʽ���������o�B(t��i)�`��ͱ���ϵ�y(t��ng)�ķ�(w��n)���ԡ�ST���O(sh��)Ӌ����׃�Y(ji��)��(g��u)׃����(sh��)�������������ܡ��ٶ��{(di��o)��(ji��)����ݔ���D(zhu��n)�����ָ����̖�cֱ���p�]�h(hu��n)�{(di��o)��ϵ�y(t��ng)��늘�����o����̖�ஔ(d��ng)��������ָ��ֵ���D(zhu��n)�Ӵ�ͨ��̖�a(ch��n)�����錍�F(xi��n)�����{(di��o)�ٷ�����ϵ�y(t��ng)�O(sh��)�������ŭh(hu��n)��(ji��)���ڻ������£����ִ�ͨ��㶨ֵ��늄әC�\���ں��D(zhu��n)��ݔ����ʽ���ڻ������ϣ���ͨ�c�D(zhu��n)�ٳɷ������M���{(di��o)��(ji��)��늄әC�\���ں㹦��ݔ����ʽ������Ӌ��C��߉�Д��̎���������Ɍ��F(xi��n)�ɷN�\��ģʽ��ƽ���ГQ��
3 ϵ�y(t��ng)Ӳ����(g��u)��
�ߵļ��ɶȺ;������·�Y(ji��)��(g��u)��ϵ�y(t��ng)�ɿ��ı��ϡ������ܡ��ɱ��Ϳɿ��Եȸ�����C��Փ�C��ϵ�y(t��ng)������ȫ��(sh��)�ֻ��O(sh��)Ӌ����Ƭ�C��DSP���p��RAM���ٸ߾���A/D�D(zhu��n)�QоƬ������·���w�������(q��)�ӱ��o��һ�w��IPMģ�K���`���ȵęz�y�·�����������������߀�и߿ɿ��Ե��_�P(gu��n)�Դ���g(sh��)�Ϳ��ٵı��o�·��
3.1���·
���·�Y(ji��)��(g��u)�����ˇ��H��ͨ�õĽ�һֱһ��늉���ģʽ����׃���ֲ��������ܹ���ģ�KIPM�����˾����IPMģ�K��(n��i)����������ȫ��IGBT�⣬߀
��(n��i)���(q��)���·���^���^�ᱣ�o�·�������Ʒ�w�ܣ���С�������ԣ�������IPM��ʹ�ã�ʹ�����·�Y(ji��)��(g��u)��麆���ҿɿ������������⣬�鱣�C��������z�y�ľ��Ⱥ��ٶȣ��҂�����KTϵ�л���������������ƺ���˾����
3��2�����·
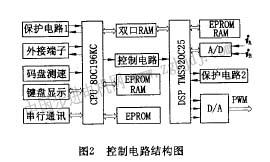
�錍�F(xi��n)���rȫ��(sh��)�ֻ�ʸ���{(di��o)�٣�ϵ�y(t��ng)������Intel��Ƭ�C80C19 6KC�͔�(sh��)����̖̎����TMS320C25�M�ɿ��ƺ��ġ���ϵ�y(t��ng)�У���Ƭ�C��Ҫ�������ϵ�y(t��ng)�Ŀ��ơ������ͱO(ji��n)�y�ȹ�����DSP�t�M�Џ�(f��)�s��ʸ�����Ƶ��\�㼰��׃���(q��)�ӵȹ���������֮�g�IJ���ͨӍ��һƬ�p��RAM (IDT7130)�팍�F(xi��n)�����˱��C����z�y�ľ��Ⱥ��ٶȣ�����������������õ��������̖��(j��ng)�߾��ȣ�12λ��������(iorls�D(zhu��n)�Q�r�g)���p�O��ģ��(sh��)�D(zhu��n)�Q����AD16 74������AD��˾���x��̎��������ǰ������ϵ�y(t��ng)���Ã���ͬ�ӵ��·�ɘӃ��������@���������Ϣ��ϵ�y(t��ng)߀�A(y��)����늴a�P�ӿ��·���ӣ������ٶ��]�h(hu��n)�rʹ�á������·�ĽY(ji��)��(g��u)�D��D2��ʾ��
4ϵ�y(t��ng)ܛ��
����ϵ�y(t��ng)�Ĺ���ȫ���Ɇ�Ƭ�C��DSPܛ�����F(xi��n)��ϵ�y(t��ng)ܛ��������Ƭ�Cϵ�y(t��ng)ܛ����DSPϵ�y(t��ng)ܛ���ɴ֡�
4.1��Ƭ�Cϵ�y(t��ng)ܛ��
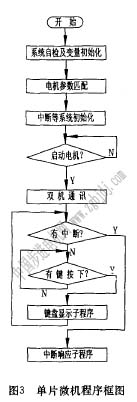
��Ƭ�Cϵ�y(t��ng)ܛ����ɳ�ʼ�����I�P�@ʾ���p�CͨӍ��I/O���ӿ��ƺʹ���ͨӍ��ܛ������ģ�K��
��ʼ��������Ҫ���ϵ�y(t��ng)�ԙz���x���ֵ���Д�ȳ�ʼ����늙C����(sh��)�z�yƥ��ȹ��ܡ�����ʸ��׃�Q���Ʒ������õ���늙C����(sh��)�����Ա�ϵ�y(t��ng)�O(sh��)��늙C����(sh��)�Ԝyԇ���ܣ����ìF(xi��n)�е���׃���·��늙C����һ���Ĝyԇ��̖�����F(xi��n)늙C����(sh��)�ԙz�y����������˴���EEPROM (9346)�У���Щ늙C�ԄӅ���(sh��)ƥ����ܟo���ṩ�M��ľ��ȣ��˕r���H��늙C����(sh��)�����I�Pݔ�롣�����I�P�O(sh��)������(sh��)����EEPROM���@������(y��ng)��Ϣ�����ɱ��档
�p�CͨӍ����늄әC����(sh��)���D(zhu��n)�ٽo�������ބ���̖��ݔ���p��RAM������(y��ng)��Ԫ����DSP�ṩ�\�ㅢ��(sh��)��ͬ�r�@������ɘ�ֵ���I�P�@ʾ��������8279�����µ�4��4�I��6λLED�팍�F(xi��n)�ģ�ܛ�������^���Σ�I/O���ܣ��籣�o��̖���ⲿģ�M���ƶ��ӣ����Æ�Ƭ�C��I/O�YԴ��ܛ����ԃ���Д����F(xi��n)������ͨӍ�t������(y��ng)��ͨӍ�f(xi��)�h���F(xi��n)�c��λ�C����Ϣ������������λ�C�Ŀ��ƣ�ͬ�r��ϵ�y(t��ng)��Ϣ�����o��λ�C��
4��2 DSPϵ�y(t��ng)ܛ��
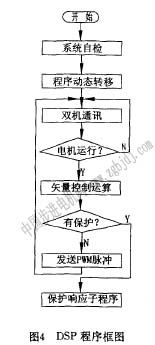
DSPϵ�y(t��ng)ܛ����Ҫ����p�CͨӍ������ɘӡ����ʸ��׃�Q���D(zhu��n)�����㡢λ���\�㡢���늉�׃�Q��늉�����(bi��o)׃�Q��늉����gʸ���xȡ�ȣ��������PWM�(q��)����̖��ͬ�r����o���ܵČ��F(xi��n)��
DSP��ϵ�y(t��ng)���֮���M��ϵ�y(t��ng)�ԙz������ϵ�y(t��ng)�����EPROM�D(zhu��n)����RAM�^(q��)�����ú��m��(y��ng)DSP�Ŀ����ԣ�ͨ�^�p��RAM�xȡ���N����(sh��)���o����Ϣ��һ���ӵ�������̖�������_ʼѭ�h(hu��n)�M��ʸ�������\�㲢����PWM�(q��)����̖��
��ÿ��ѭ�h(hu��n)�У����Ȇ��Ӄ�ƬA/DоƬ�M��ģ
��(sh��)�D(zhu��n)�Q�������xȡ������p��RAM�е��\���YԴ��Ϣ�����ɘӵ��Ķ��������Ϣݔ���p��RAM�����Ƭ�C�ṩ��Ϣ��Ȼ���ԃA/D�D(zhu��n)�Q�Y(ji��)����(bi��o)־���D(zhu��n)�Q��ɕr�㌢���������(sh��)��(j��)�քe�x��DSP������(j��ng)��(bi��o)��׃�Q�õ����ඨ�������˲�rֵ����(j��ng)�^����(bi��o)���Q�õ�d-q�Sϵ��������������M���D(zhu��n)�����㲢�M���ٶ��{(di��o)��(ji��)�\�㣬�����ӽ��l�ʷe������D(zhu��n)�Ӵ�ͨ��λ�ã�Ȼ���ٽ�(j��ng)�^d-q�Sϵ�����늉�׃�Q�̓��࣯����늉���׃�Q���x������m��늉�ʸ�����γ��_�P(gu��n)��̖�(q��)����׃������늙C�M���ٶȿ��ơ�ϵ�y(t��ng)߀�������˲�r������Ƶ�ǰ���a���������^(q��)늉��M������Ч���a�����Է�ֹ�ڵ��l�^(q��)�����ʧ����D(zhu��n)���}�ӡ�
���⣬�p�C�xȡ�p��RAM�Ĕ�(sh��)��(j��)�r�����șz�y����(y��ng)�Ę�(bi��o)־λ���Դ_����(sh��)��(j��)��Ϣ�Ĝ�(zh��n)�_���@�ӵ�ܛ���Y(ji��)��(g��u)��Ч�������ϵ�y(t��ng)�Ŀɿ��ԣ��p�C��Ϣ����ϵ�y(t��ng)�ij����D��D3���D4��ʾ����(sh��)��(j��)���Ђ�ݔ�M����ϵ�y(t��ng)�Č��r��Ҫ��
5 �S����ϵ�y(t��ng)����
ϵ�y(t��ng)��ܛӲ���YԴ���C�������S����ϵ�y(t��ng)���ܡ�
V��F�\�D(zhu��n)ģʽ��ϵ�y(t��ng)ܛ����(n��i)���ͨ�õ�V/Fģʽ���{(di��o)������Ҫ�ߺ���������á��@�r�ɺ����S���·�Y(ji��)��(g��u)������ϵ�y(t��ng)�ɱ���
�Ԅ��{(di��o)�����ܣ�ͨ�^�z�y��ֱ��ĸ��늉�ֵ�c����(zh��n)늉��M�б��^���������`������ָ��늉����}�����ɴˌ��F(xi��n)ݔ��늉����Ԅ��{(di��o)�����ܣ��Կ˷�늾W(w��ng)���Ӻ�ؓ�d׃�������ݔ��늉��cָ��늉������ǺϬF(xi��n)��
��(ji��)���\�D(zhu��n)����V/Fģʽ�£���(d��ng)ؓ�d�^�p�r��ͨ�^�x����m��V��F������Ɍ��F(xi��n)��(ji��)�ܡ���ϵ�y(t��ng)���Ԝyԇ��ݔ��늙C����(sh��)���綨���D(zhu��n)����衢늸еȣ����Y(ji��)���@Щ����(sh��)��һ��늉�������(n��i)�����S�ִ�ͨ�㶨�������С��****�����c���ҵ����{(di��o)������(y��ng)��V/Fֵ��Ɍ��F(xi��n)��(ji��)���\�D(zhu��n)���ܡ�
�ٶ��]�h(hu��n)���ƣ��o�ٶȷ���ʸ������ϵ�y(t��ng)���o�� ���Ѻ�****�����������^�ٶ��]�h(hu��n)ϵ�y(t��ng)߀�д����M һ����ߣ���������Ҫ��ߕr��ϵ�y(t��ng)��ȡ�ӽ��ٶȱ��γ��ٶ��]�h(hu��n)���ٶ��}�_ݔ���Ɇ�Ƭ�C���ⲿ�¼�Ӌ��(sh��)��������
����ϵ�y(t��ng)߀�߂�Ĺ����У������^���ʧ�ٷ�ֹ���Ƅ��^늉���ֹ��˲ͣ�������D(zhu��n)���ԄӸ�ۙ����Ҏ(gu��)���^�d���^������·��ȱ�ࡢ�^�ᡢ�ӵصȱ��o�����õ��˙C��Ԓ����(n��i)��RS485����ͨӍ�ӿڣ����M���h���x���ƣ���(n��i)��PID,�����Π��S�������Ӝp�ٹ��ܼ��o�����\�D(zhu��n)�ȡ�
6ϵ�y(t��ng)�yԇ
�����������O(sh��)Ӌ��18. 5kW׃�l�{(di��o)��ϵ�y(t��ng)�M���ˎ�ؓ�d�\�D(zhu��n)�{(di��o)ԇ�������늄әC��4�O��\ʽ�Y(ji��)��(g��u)���~�����ʞ�18. 5kW,׃�l��ݔ������(sh��)���~������30kVA���~�����39A�������^����������ٷ�֮150Imin���ٷ�֮200 ls��
�o�B(t��i)���Ԝyԇ��
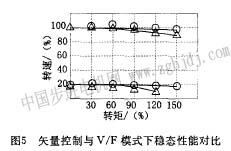
�D5��V/F����ģʽ�c�o�ٶȷ���ʸ������ģʽ�£����d��ͬؓ�d����(w��n)�B(t��i)���õ��ĽY(ji��)�������У��M����(bi��o)���~���D(zhu��n)�صİٷֱȣ��v����(bi��o)���~���D(zhu��n)�ٵİٷֱȡ��ɈD��Ҋ��V��Fģʽ�£�늙C�D(zhu��n)���Sؓ�d׃���^���ң����o�ٶȷ���ʸ�����Ʒ�ʽ�£�늙C�ٶȎ�����ؓ�d��Ӱ푣���(w��n)�B(t��i)���ȸߡ�
�ӑB(t��i)���Ԝyԇ��
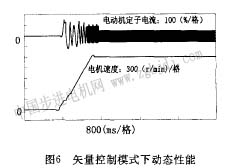
�D6��ϵ�y(t��ng)���ӕr��������D(zhu��n)�لӑB(t��i)�D���ɈD��Ҋ��ϵ�y(t��ng)����ƽ��(w��n)���D(zhu��n)�١���������^�ã��yԇ������ϵ�y(t��ng)�ӑB(t��i)푑�(y��ng)�죬�o����ٶȳ��{(di��o)�����ɔ_��������
7�Y(ji��)�Z
�ڟo�ٶȷ���ʸ������ģʽ�£�ϵ�y(t��ng)�Ɍ��F(xi��n)��Ҏ(gu��)׃�l���o�����F(xi��n)�ĵ����(q��)�ӡ��������D(zhu��n)�ء����D(zhu��n)�پ��ȡ��Ӝp�����ܣ�ʹ׃�l�{(di��o)�ّ�(y��ng)���I(l��ng)���Mһ���U���˝M�㱾������Č��H���}�⣬ԓ�ͨ��׃�l��߀�ɑ�(y��ng)���ڽ��ټӹ����켈��������ӡȾ���\ݔ�Cе���{(di��o)�پ��ȺͼӜp���D(zhu��n)�ؿ�������Ҫ���^�ߵĈ�
|