��������PSS�Ą��ϵ�y(t��ng)��ģ�c����
���ı�1�����X��1����܊־1���T����2
(1���ϴ�W(xu��)늚��c��ϢI�̌W(xu��)Ժ�������Lɳ410082;
2������Ϣ�I(y��)���g(sh��)�W(xu��)Ժ�������Lɳ410200)
ժҪ���Y(ji��)�ό�(sh��)�H�\(y��n)��I_�r����MATLAB�h(hu��n)���£���(zh��n)�_��������ͬ���l(f��)늙C(j��)���ϵ�y(t��ng)ģ�ͣ������ɘӆ�Ԫ�����Ɔ�Ԫ���ʆ�Ԫ��ģ�͡��Ԅ���{(di��o)��(ji��)��PlD���ƞ������ƣ�����������y(t��ng)��(w��n)����(Pss)���o�����ƣ����ڕ��B(t��i)�l�����M(j��n)�з��棬����Y(ji��)��������PlD+Pss���ƵĄ��ϵ�y(t��ng)���НM���������ԣ��˷�r��ͨ����{(di��o)��(ji��)�������Ƶ��l��ʎ�ȷ�����ڵIJ��㣬ʹ�l(f��)늙C(j��)�Ŀ��_�����������Ƶ��l��ʎ���ϻ֏�(f��)�����܃�(y��u)�چμ���PID���Ƅ��ϵ�y(t��ng)��
�P(gu��n)�I�~��ͬ���l(f��)늙C(j��)�����ϵ�y(t��ng)�����ϵ�y(t��ng)��(w��n)����
�ЈD���̖��TM341 �īI(xi��n)��(bi��o)�R�a��A���¾�̖��1673_6540(2009)12 0006-04
O �� ��
���ϵ�y(t��ng)��ͬ���l(f��)늙C(j��)����Ҫ�M�ɲ��֣������ϵ�y(t��ng)�\(y��n)�еĿɿ��Ժͷ�(w��n)��������ֱ��Ӱ푡���Ҏ(gu��)��ŵ�(ji��)������PID���Ʒ�ʽ�����ƺ��������ڌ�(sh��)�F(xi��n)���õ��˷dz��V���đ�(y��ng)����1�������μ��İ��C(j��)��늉�ƫ���M(j��n)�е�PID���Ʒ�ʽ���o���ṩ���˝M����������ԣ��e�����ڿ��ƴ��͵İl(f��)늙C(j��)�C(j��)�M�r���������Բ���a(ch��n)���l(f��)�ĵ��l��ʎ�����{���ϵ�y(t��ng)�ķ�(w��n)���ԡ����ϵ�y(t��ng)��(w��n)����(Pss)��Ҫ�������Ƹɔ_��Ĺ�����ʎ����ϵ�y(t��ng)��·����˲�g�ĕ��B(t��i)�^����ʹ���늉������ٶ�׃�죬�ӿ�l(f��)늙C(j��)��늉��Ļ֏�(f��)������MATLABƽ�_����������ͬ���l(f��)늙C(j��)���ϵ�y(t��ng)ģ�ͣ�����PID+����Pss������Ɔ�Ԫ������Ӕ_�Ӻ������·���B(t��i)�l���£������ϵ�y(t��ng)�M(j��n)�з��档
1 ���ϵ�y(t��ng)ģ��
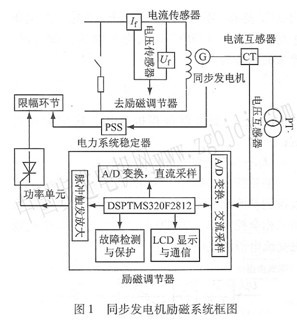
ͬ���l(f��)늙C(j��)���ϵ�y(t��ng)��D1��ʾ���Ʉ���{(di��o)��(ji��)����Pss���l(f��)늙C(j��)�ȽM�ɡ�
ͬ���l(f��)늙C(j��)ݔ��늉��������(j��ng)늉������������������ݔ�뵽��̖�D(zhu��n)�Qģ�K������A��D�D(zhu��n)�Qͨ����ͬ�r�����늉��������(j��ng)��̖�D(zhu��n)�Qģ�K׃�Q������A��DоƬ���C(j��)cPu���ɘӵĽY(ji��)���M(j��n)�п����㷨�\(y��n)�㣬�õ��Y(ji��)��ݔ���}���{(di��o)��(PwM)��̖���(q��)��ع���|�l(f��)�O��ͨ�^���Ƅ�������С���{(di��o)��(ji��)���늉���Pss�ɼ��l(f��)늙C(j��)늹���ƫ����D(zhu��n)��ƫ���(j��ng)�^��̖׃�Q��̎���ȣ��c����{(di��o)��(ji��)��
��ݔ����(j��ng)���h(hu��n)��(ji��)��ͬ�{(di��o)��(ji��)���늉������ϱO(ji��n)�y��LcD�@ʾģ�K��(sh��)�r�O(ji��n)�y���@ʾϵ�y(t��ng)��ݔ���ݔ����
1��1��(sh��)��(j��)�ɘӆ�Ԫģ��
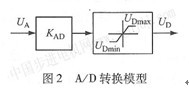
�����C(j��)��늉�������y��ģ�K������{(di��o)��(ji��)������Ҫ�ɘӵ�����������C(j��)�˾�늉��;���������늉�����������8·��̖���քe����ֱ���ɘӺͽ����ɘӡ�ÿ·��̖�y���·���֞�ɂ����֣�ģ�M׃�Q���ֺ�A��D�D(zhu��n)�Q���֡�����ÿ·��̖��ģ�M׃�Q���֣������ڞV���·����˴����ӕr����һ�A�T�ԭh(hu��n)��(ji��)1��(1+Ts)������������A��D�D(zhu��n)�Q����ģ�M���D(zhu��n)�Q�锵(sh��)������������һ���Ŵ�h(hu��n)��(ji��)�������Ŵ�ϵ��(sh��)��
KAD=2n/Vref
ʽ�У�n����A/D�D(zhu��n)�Q����λ��(sh��)��
Vref����A/D�D(zhu��n)�Q���ą���늉���
A/D�D(zhu��n)�Q����ģ����D2��ʾ��
�����C(j��)��늉��������C(j��)�������6·��̖���ý����ɘӡ��ɘӔ�(sh��)��(j��)̎���Ԫ��ܛ���팍(sh��)�F(xi��n)������16�c(di��n)�����~�㷨�������ɘӔ�(sh��)��(j��)�M(j��n)��̎����늉��������(sh��)���IJ�ַ���չ�_���M(j��n)��z׃�Q���ɵ�늉���(sh��)����̓���Ă��f����(sh��)���Ķ�������й����ʡ��o�����ʺ͟o�������
l.2���Ɔ�Ԫģ��
���Ɔ�Ԫ���{(di��o)��(ji��)���ĺ��ġ����Ͱl(f��)늙C(j��)�M�Ą��ϵ�y(t��ng)Ҫ���НM����������ԣ��Է�ֹ���F(xi��n)���l��ʎ��ͨ������PID+Pss���ơ�P1D��Ԫ�����{(di��o)��ֺ�PID���Ʋ��֡��{(di��o)����迼�]���l(f��)늙C(j��)�M�IJ�(li��n)�\(y��n)��[1]���{(di��o)��ֵ�ݔ�롢ݔ���P(gu��n)ϵ�飺
ʽ�У�U��ref�����C(j��)��늉��o��ֵ��
|