���M늄әC���������OӋ�c���F
ժҪ��Փ���������ʸ������������Dԭ�����A�IJ��M늄әC�����Ӽ��g���OӋ���Æ�Ƭ�C��St��VV2~����Ƶ����ʸ������������D�ļ�����ģʽ����ͨ�^ܛ�����F��N�����ӿ��ƣ��ڴ˻��A�Ϟ������`��������������h�������F�ˌ����ʽ���M늄әC�ľ��_�\�п��ơ����Y��������ϵ�y�܉�M���Ñ��Ķ�λ����Ҫ����Ч���������\�����͙Cе��ӡ�
�P�I�~����Ƭ�C�����M늄әC�������ӣ��OӋ�����
0����
�������{�и��N�Ӽ��g�Ļ��A�ϣ��OӋ�˻������ʸ������������D�����ۙ���}���{�Ƽ��g�Ķ༚��������ʽ���M늙C���������˝M�㲻ͬ�Ñ��Ͳ�ͬ늙C��Ҫ���OӋ����
��N���ַ�ʽ�Ͳ���ǣ�����ݔ����ͬ������������������������\�Еr�p����늙C�ĵ�����ӣ��\�Dƽ�������pС������
1���ּ��g
���M늙C�IJ���o��������(z�����X����������
z��v��)�����������칤ˇ�����ƣ��X���������úܶ࣬��˲���ǾͲ����ܺ�С���������·��70��������������W���״���������ǽ����ڲ��M늙C�ĸ����@�M���댦�Q�Ͳ�������ԇ������ҵĻ��A�ϡ���ͨ�^����늄әC�����@�M������Ĵ�С�ͱ�����ʹ����ǜpС��ԭ���Ď�֮һ����ʮ��֮һ���������ܘO��ظ��Ʋ��M늙C�\��ƽ���ԡ������������̎��C���g�İlչ�����ּ��g�õ��ˏV�����á�
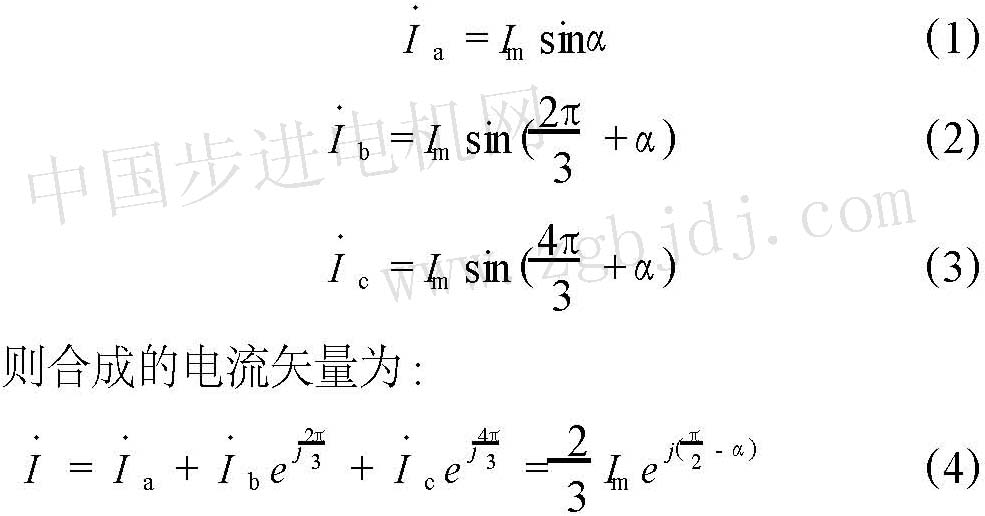
ͨ�����M늙C�������е���������ӷ������ʸ������������D��������������ӷ���ÿ���@�M����M���ГQ�r�����nj��@�M���ȫ��ͨ����г���������һ���@�M������ֲ�׃����r�£���һ���@�M�������������pС���@��늙C�ĺϳɴň�ֻ���Dԭ늽Ƕȵ�һ���֣����F�����ӡ����ǵ���������܌��F���ֲ���ǣ�������Dz����������������M늙C����ʎ��ʧ�������⣬�������ʸ���ķ�ֵ�����׃��ݔ�����صĴ�СҲ�o�����ֺ㶨��
����ʹ���ֺ�IJ���Ǿ���һ�£���ݔ�����غ㶨�����OӋ�������ʸ������������D�ļ�
���ӷ�����ԓ�����ڿ��g�ό��˴����2���ӵ�m���@�M���քeͨ����λ�����2���c����ֵ��ͬ������������t�ϳɵ����ʸ�����ň�ʸ��)���ڿ��g�����D�\�ӣ��ҷ�ֵ���ֲ�׃���@��ÿ��ݗ�ǵ�ʸ��mֵ�l��׃���r���ϳ�ʸ���D�^һ�������ĽǶȣ��ҷ�ֵ��С���ֲ�׃���Ķ����F�������ء�����Ǿ���ļ����ӡ�
��������ʽ���M늙C�����������@�M�ڿ��gλ�������2أ��3���o�����@�M�քeͨ��λ���2أ��3����ֵ��ͬ�����Ҳ�������t�ϳɵ����ʸ���ڿ��g����ֵ�㶨�����D�\�ӡ�
��׃���r���ϳ�ʸ���D�^һ�������ĽǶȣ���ֵ��С���ֲ�׃������Փ������c���س������Pϵ�����Ҳ�͌��F�˺����ء�����Ǿ����ӡ���ʽ(1)��(3)���鲽�M늙C���ֿ��ƵĔ��Wģ�ͣ���˼���ֻҪ����ʽ(1)��(3)�o�����@�Mͨ����������_�����ؽǼ��ֵ�Ŀ�ġ����Ѳ��M늙Cÿ���@�M����������ֳɢ��A�ݣ��͌��F�ˢ����֡�
������������־��w��ʩ�r����һ�����ڵ����Ҳ�256�ȷ֣�Ҳ����ȡ256���ɘ��c��������ɘ��c������ֵ���ٌ��ɘ�ֵ�D�Q�ɶ��M�Ɣ��������˔����惦����Ƭ�C���ڴ惦���н���һ��256���ֱ����@�Ǽ��ֵ�����A�Ĕ����������ļ��ּ�����4��16��32��64��128���ֵĔ��������@�������g����Ҏ��ȡ�Ô�����
2�����ӵ�s��M����
�������������ԭ���ķ������������ƌ�
��߲��M늙C���\���������P��Ҫ�������Ŀ��ƭh�����������ۙ�̈́h��ʽ���ɼ�����̖�l���h�������ֿ��ƭh���̈́�M�}���{�ƭh���ȽM�ɡ����o����̖�c늙C������y��̖����^��
���H���ֵ���ڽo��ֵ���tͨ�^��׃���_�P�����Ą���ʹ֮�pС����֮���t���ӡ����Hݔ����� |



