���r���漼�g(sh��)���\�ӿ���ϵ�y(t��ng)�еđ�(y��ng)��
��ǰ�����l(w��i)��������
(�������I(y��)��W(xu��)���������710072)
ժҪ�����r���漼�g(sh��)�����ڲ���Ҫ������ԭ�ͅ��c�ėl������ɿ����㷨�������u����dSPACEϵ�y(t��ng)�nj��r���漼�g(sh��)�о������Ñ�(y��ng)��ƽ�_�����ṩ���������r�Ŀ��Ʒ�ʽ�ԝM�㲻ͬϵ�y(t��ng)�Ŀ���Ҫ����MATLAB��Simulink�������ٶȺ�����p�]�h(hu��n)������ͬ��늄әCֱ���D(zhu��n)�ؿ��ƵČ��r�������ģ�͡�ͨ�^dSPACE���r����ϵ�y(t��ng)�Լ�����(y��ng)�Ĺ����(q��)���·�����F(xi��n)������ͬ��늄әC���\�ӿ��ƣ��@���˝M��Ŀ���Ч����
�P(gu��n)�I�~�����r���棻�\�ӿ��ƣ�dSPACE���д�ͬ��늄әC��ֱ���D(zhu��n)�ؿ���
�ЈD���̖��TM343 �īI��(bi��o)�R�a��A ���¾�̖��1004��7018(2008)12��0004��04
����
�����ǽ�����Ӌ��C���������P(gu��n)��Ӳ���O(sh��)�䣬ͨ�^ģ�͌�ϵ�y(t��ng)�M���о��ķ��������r���漼�g(sh��)���ڿ��]���r�����㷨������ϵ�y(t��ng)�ĕr�r�gͬ���Լ��r�g���t���a��?sh��)Ļ��A(ch��)�ό�ϵ�y(t��ng)�M�еĄӑB(t��i)���棬����ģ��ϵ�y(t��ng)�ڌ��H�l�����r�\�е��挍��ӳ���c��(sh��)�ַ�����ȣ����r�����****��(y��u)�������O(sh��)Ӌ��ϵ�y(t��ng)�܉�ֱ�������ڱ��،������ڱ��،���ֱ�Ӆ��c��C�^�̣��������܉�?q��)����O(sh��)Ӌϵ�y(t��ng)����Ч���M���u����������һ��Ĺ��I(y��)�I(l��ng)���Ì��r���漼�g(sh��)�����܉���ؿs��ϵ�y(t��ng)�аl(f��)���ڣ�߀�܉���Ч����ϵ�y(t��ng)�аl(f��)�ɱ���
�ڮ�(d��ng)����Ԅӻ����g(sh��)�У��\�ӿ���ϵ�y(t��ng)��������;****�������(f��)�s���΄�(w��)���\�ӿ���ϵ�y(t��ng)�İl(f��)չ�܉�?q��)��F(xi��n)�(q��)�ӿ��ƹ��ܵĶ��ӻ��͏�(f��)�s�ԣ��M�㲻ͬ�����a(ch��n)Ҫ���ŷ����Ƽ��g(sh��)�nj��F(xi��n)�(q��)�ӿ��ƹ��ܵĻ��A(ch��)�c�P(gu��n)�I���g(sh��)֮һ[2]������ͬ��늄әC�����ŷ�ϵ�y(t��ng)�ڼ��g(sh��)����څ�ڳ��죬���Ѓ�(y��u)���ĵ������ܣ����Ɍ��F(xi��n)���Ÿ��ٿ��ƣ��،���ϵ�y(t��ng)�{(di��o)�ٵķ������܉��m��(y��ng)�������ŷ��(q��)�ӵ�Ҫ���S�����Ų������ܵĴ������ߺ̓r��Ľ��ͣ�����늙C�ڹ����a(ch��n)�Ԅӻ��I(l��ng)���еđ�(y��ng)��Խ��Խ�V����
�����о�����dSPACE���r����ϵ�y(t��ng)�Č��r���漼�g(sh��)�����P(gu��n)ԭ������ͨ�^�ٶ��c����p�]�h(hu��n)������ͬ��늄әCֱ���D(zhu��n)�ؿ��ƌ������U�����r���漼�g(sh��)���\�ӿ���ϵ�y(t��ng)�еđ�(y��ng)��ԭ����
1���r���漼�g(sh��)����
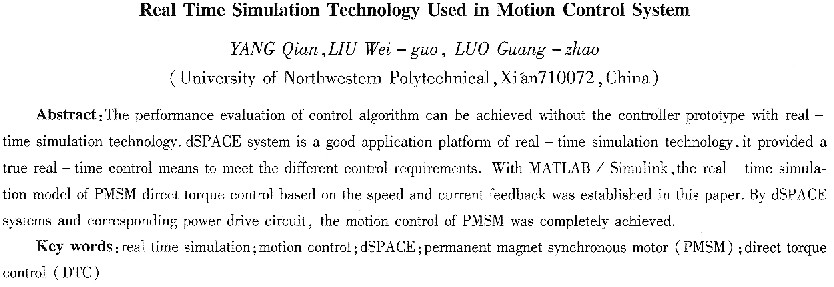
��(y��ng)�Ì��r���漼�g(sh��)�O(sh��)Ӌ�\�ӿ���ϵ�y(t��ng)�ķ�����D1��ʾ��
����(j��)�o��ϵ�y(t��ng)���O(sh��)Ӌָ��(bi��o)��������\�ӿ���ϵ�y(t��ng)�Ĕ�(sh��)�ַ���.��(d��ng)�x������@�ÝM��Y(ji��)�����ܿ،�����x������ͨ�^����(y��ng)�Ľӿ�ģ�K���������B�r�����M(RTw)�M�ДUչ�������r����ģ�����Ɍ��r���a�����ԄӾ��g���B�ӡ����d�����rӲ���С����rӲ���c�ⲿ�(q��)���·�B�ӣ���ɿ��ƹ����c������̖�ɼ���contmlDesk�ṩ��ԇ��^�̵ľC�Ϲ������ھ�����(sh��)�{(di��o)���������Ñ�̓�M�x���Լ����r�^�y����Ч���ȹ��ܡ�
�����·��ݔ��Ĺ��l늉��D(zhu��n)�Q��ֱ��늉�����(j��ng)�^�V��������׃����ֱ��ĸ��늉���ͨ�^dsPAcE��Ds4002t��wM3-OuTģ�K�a(ch��n)����PwM������̖����(j��ng)�^��늸��x�·�����(q��)�Ӱ�����׃���Ŀ�����̖����늄әC�\�С�
4 dSPAcEϵ�y(t��ng)���\�ӿ���ϵ�y(t��ng)�еđ�(y��ng)���e��
���Ľo��������ͬ��늄әC�\�ӿ���ϵ�y(t��ng)�����ٶȭh(hu��n)������h(hu��n)�p�]�h(hu��n)��ֱ���D(zhu��n)�ؿ��Ʒ����������\�ӿ���ϵ�y(t��ng)��D��D4��ʾ��
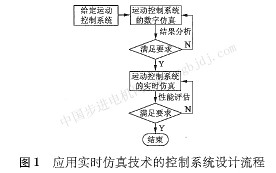
�ٶȷ���������ʽ��늾��a�����F(xi��n)��dsPAcEϵ�y(t��ng)��DS3002�ӿڰ匣�T��������ʽ���a����̖ݔ�롣ͨ�^19S3002��POSһB1һc1ģ�K�O(sh��)�ÿ��Եõ��ı��l�ķ����}�_��̖��DS3002��POS��clģ�K�Ѓɂ�ݔ����һ�������}�_��(sh��)��ʾ���D(zhu��n)��λ����̖����һ�������D(zhu��n)��λ�ò��ʾ���ٶ���̖�������D(zhu��n)�ӵij�ʼλ�ÿ����������c�����Ա�회��D(zhu��n)����λ�M��У��(zh��n)��ͨ�^Ds3002��INDEx B1 cl��λ��̖�z�yģ�K��DS3002��POs��B1һclλ����̖�y��ģ�K���Ԍ��F(xi��n)����ͬ��늄әC�D(zhu��n)�ӳ�ʼλ��У��(zh��n)���ٶȷ������D(zhu��n)�ӳ�ʼλ����̖У��(zh��n)��ϵ�y(t��ng)��D5��ʾ��
�D(zhu��n)���ٶȜy����ϵ�y(t��ng)��D6��ʾ��ͨ�����r����ĕr�g���L�����ڌ��r����ϵ�y(t��ng)Ӳ���l�����S��ȡ����С���ɘӕr�g�t����(j��)ϵ�y(t��ng)Ҫ��ľ��ȣ��˞��O(sh��)�ã���С�錍�r����ĕr�g���L�����ڲɘӕr�g�͌��r����ĕr�g���L�����L�����H���D(zhu��n)���ٶ���һ�Εr�g��(n��i)�D(zhu��n)�ӵ�ƽ���ٶȡ�
|