�����p��������늙C(j��)�Ļ�τ�(d��ng)����܇(ch��)
�{(di��o)��ϵ�y(t��ng)��ģ�c����
����������������
(�|�ϴ�W(xu��)늚�̌W(xu��)Ժ�ŷ����Ƽ��g(sh��)�����������о����ģ��Ͼ�210096)
ժҪ���������τ�(d��ng)����܇(ch��)�ľC��Ч�ʣ������һ�N���p�������şo(w��)ˢ늙C(j��)�鹦�ʷ����b��
�����ʹ�(li��n)ʽ��τ�(d��ng)����܇(ch��)����ӟo(w��)��(j��)�{(di��o)��(E��cVT)ϵ�y(t��ng)���ڷ���늙C(j��)��(sh��)�W(xu��)ģ�͵Ļ��A(ch��)�ϴ���p�������şo(w��)ˢ늙C(j��)(DSPMBL)��Matlab��Simulink����ģ�ͣ�ͬ�r(sh��)�����˰��D(zhu��n)�Ӵ�朶���Į���늄�(d��ng)�C(j��)ʸ�����Ʋ��ԣ�������ԓ���ͻ�τ�(d��ng)����܇(ch��)�{(di��o)��ϵ�y(t��ng)�ķ�(w��n)�B(t��i)�̈́�(d��ng)�B(t��i)����ģ�ͣ�����(du��)����(g��)ϵ�y(t��ng)�M(j��n)���˷����о�������Y(ji��)��������ԓ�{(di��o)��ϵ�y(t��ng)���H����E��CVT�Ĺ��ܣ����ҿ�����Ч�������܇(ch��)Ч�ʡ�
�P(gu��n)�I�~���p���ӣ�����늙C(j��)����τ�(d��ng)����܇(ch��)����ӟo(w��)��(j��)�{(di��o)�٣�����
����
��τ�(d��ng)����܇(ch��)(Hybird Electric Vehicles��HEVs)�ȿ˷��˼�늄�(d��ng)��܇(ch��)���m(x��)���̶̡��r(ji��)��
�F��ȱ�c(di��n)�����܉����p���������ģ�����β���������鮔(d��ng)ǰ��Դ�ͭh(hu��n)����(w��n)�}�Ľ�Q�ṩ��һ�N��˼·[1-2]����(li��n)ʽHEVs���Ъ�(d��)������܇(ch��)����(du��)�l(f��)��(d��ng)�C(j��)�M(j��n)�п��Ƶă�(y��u)�c(di��n)���Ķ�ʹ�ðl(f��)��(d��ng)�C(j��)�ɷ�(w��n)�������ڸ�Ч�^(q��)����ŷŅ^(q��)�����ǣ����ڰl(f��)��(d��ng)�C(j��)ݔ���ęC(j��)е���ɰl(f��)늙C(j��)�D(zhu��n)������ܣ�����늄�(d��ng)�C(j��)������D(zhu��n)����C(j��)е���Á�(l��i)�(q��)��(d��ng)��܇(ch��)��;��(j��ng)�ɴ������D(zhu��n)�Q����˴�(li��n)ʽHEVs�ľC��Ч������(du��)�^��[3]��ᘌ�(du��)����ȱ�c(di��n)�����������һ�N���p�������şo(w��)ˢ(DSPMBL)늙C(j��)�鹦�ʷ����b�õ�������ӟo(w��)��(j��)�{(di��o)��(E��CVT)ϵ�y(t��ng)���������DSPMBL늙C(j��)��Ч�ʡ��߹����ܶȵă�(y��u)�c(di��n)[4-6]�������HEVs����܇(ch��)Ч�ʡ�
1 ����DsPMBL늙C(j��)�ğo(w��)��(j��)�{(di��o)��ϵ�y(t��ng)�Y(ji��)��(g��u)
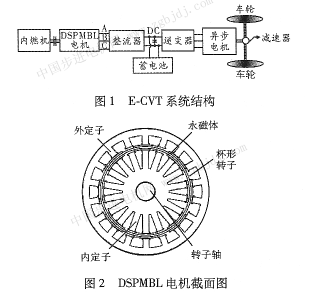
��������Ĵ�(li��n)ʽ��τ�(d��ng)����܇(ch��)E��CVTϵ�y(t��ng)�Ƀ�(n��i)ȼ�C(j��)��DSPMBL늙C(j��)�ͮ���늙C(j��)�����ֽM�ɡ�����֮�g�ô�(li��n)��ʽ�M����܇(ch��)��(d��ng)����Ԫϵ�y(t��ng)��EһCvTϵ�y(t��ng)�Y(ji��)��(g��u)��Dl��ʾ��
DsPMBL늙C(j��)��ԓϵ�y(t��ng)�еĺ��IJ��֡��D2��OSPMBL늙C(j��)�Y(ji��)��(g��u)ʾ�⡣�D�У�DsPMBL늙C(j��)��Ҫ���(n��i)���ⶨ�ӣ���(n��i)���������w���D(zhu��n)���F�ĭh(hu��n)���D(zhu��n)���ȽM�ɡ���(n��i)���������w�քeճ�N���F�ĭh(hu��n)�ă�(n��i)��N��s�O���e(cu��)���С�
2 DSPMBL늙C(j��)��(sh��)�W(xu��)ģ��
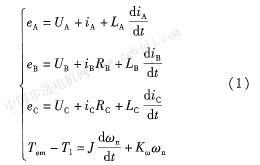
�b��DsPMBI��늙C(j��)���Ѓ�(n��i)��������@�M���䔵(sh��)�W(xu��)ģ��Ҳ�֞��(n��i)��ɲ��֡��ڷ���ԓ늙C(j��)�r(sh��)�����O(sh��)늙C(j��)�������ҷ�늄�(d��ng)��(sh��)���Σ������]��·ͣ����Ԝu���p�ĺʹŜ��p�ġ���Ҫָ�����ǣ����ڃ�(n��i)�ⶨ���g�����w�͚�϶�Ĵ��ڣ���(n��i)�����c�ⶨ�ӵĻ��п��Ժ��Բ�Ӌ(j��)����ˣ����Եõ�DsPMBI��늙C(j��)�Ĕ�(sh��)�W(xu��)ģ�͡���(du��)�ⶨ���@�M�У�
ʽ�У�eA,UA,iA,RA, LA�քe���ⶨ��A���@�M�ķ�늄�(sh��)����늉���늘��������衢�ԸУ�eB,uB,iB,RB,LB�քe���ⶨ��B���@�M�ķ�늄�(sh��)����늉���늘��������衢�ԸУ�ec,Ucic��Rc��Lc�քe���ⶨ��c���@�M�ķ�늄�(sh��)����늉���늘��������衢�ԸУ�T1��ؓ(f��)�d�D(zhu��n)�أ�Iem��늙C(j��)늴��D(zhu��n)�أ���m��늙C(j��)�ęC(j��)е���ٶ�(rad��s)��J�����D(zhu��n)�ӻ����(d��ng)ϵ�y(t��ng)���D(zhu��n)��(d��ng)�T����K�؞�Ħ��ϵ��(sh��)��
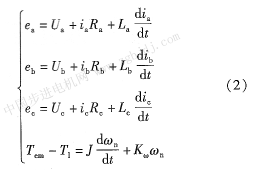
��(du��)DSPMBL늙C(j��)��(n��i)�����@�M��:
ʽ�У�ea,Ua,ia,Ra,La�քe���(n��i)����A���@�M�ķ�늄�(sh��)����늉���늘��������衢�ԸУ�eb,Ub,ib,Rb,Lb�քe���(n��i)����B���@�M�ķ�늄�(sh��)����늉���늘��������衢�ԸУ�ec,Uc,ic,Rc,
Lc�քe���(n��i)����c���@�M�ķ�늄�(sh��)����늉���늘��������衢�ԸУ�T1��ؓ(f��)�d�D(zhu��n)�أ�Tem��늴��D(zhu��n)�أ���m��늙C(j��)�ęC(j��)е���ٶ�(rad��s)��Js���D(zhu��n)�ӻ����(d��ng)ϵ�y(t��ng)���D(zhu��n)��(d��ng)�T����K����Ħ��ϵ��(sh��)��
3 E��CVTϵ�y(t��ng)ģ��
����(j��)ϵ�y(t��ng)�Y(ji��)��(g��u)�D��������(g��)�h(hu��n)��(ji��)���Էֽ⼚(x��)�������ԫ@�ôMadah��simulink����ģ�͡�����DSPMBL��늙C(j��)��E��cvTϵ�y(t��ng)ģ����Ҫ��DsPMBL늙C(j��)���w�����Ƽ��(q��)��(d��ng)�·����׃�Q������Ҫ |