һ�N����ͬ��늙C(j��)������Ƶ��·���
�O�Ԗ|��������������˂����S�� �����K��W(xu��)늚���Ϣ���̌W(xu��)Ժ���(zh��n)��212013��
ժҪ��ᘌ�(du��)����ͬ��늙C(j��)�@һ��׃�����Ǿ��ԡ���(qi��ng)��ϵĿ��ƌ�(du��)�������һ�N������(j��ng)�W(w��ng)�j(lu��)�ھ����R(sh��)������ͬ��늙C(j��)��ϵ�y(t��ng)��������·�����ͨ�^(gu��)�o�B(t��i)��(j��ng)�W(w��ng)�j(lu��)�ӷe������(l��i)��(g��u)������ͬ��늙C(j��)����ϵ�y(t��ng)�����ڌ�(sh��)�H�\(y��n)���в����������(j��ng)�W(w��ng)�j(lu��)��(qu��n)ֵ��ʹ������_�رƽ���ϵ�y(t��ng)������ϵ�y(t��ng)�c����ͬ��늙C(j��)ԭϵ�y(t��ng)��(f��)�ϳɃɂ�(g��)�ξ�����ϵ�y(t��ng)��ʹ����ͬ��늙C(j��)����ɶ��A�����D(zhu��n)����ϵ�y(t��ng)��һ�A���Դ����ϵ�y(t��ng)���ڴ˻��A(ch��)�ϣ��\(y��n)�þ���ϵ�y(t��ng)��Փ�M(j��n)�оC�ϡ�����ԇ�(y��n)�����@�N���Ʋ����܉�?q��)��F(xi��n)����ͬ��늙C(j��)�D(zhu��n)�ٺͶ��Ӵ��֮�g�Ą�(d��ng)�B(t��i)������ƣ�����ϵ�y(t��ng)�������õĄ�(d��ng)�o�B(t��i)���ܡ�
�P(gu��n)�I�~������ͬ��늙C(j��)����(j��ng)�W(w��ng)�j(lu��)����ϵ�y(t��ng)���ھ����R(sh��)���������
�ЈD���̖(h��o)��TM341; TM351; TP271+ 72 �īI(xi��n)��(bi��o)־�a��A ���¾�̖(h��o)��1001-6848( 2010) 01-0061-05
0 �� ��
����ͬ��늄�(d��ng)�C(j��)���К�϶���ܸߡ��w�eС�����ܺá��Y(ji��)��(g��u)��(ji��n)�Ρ��ɿ��Ըߡ�ݔ���D(zhu��n)�ش�����c(di��n)���ڹ��I(y��)�Ԅ�(d��ng)������(sh��)�ؙC(j��)�����C(j��)���ˡ��ÙC(j��)�����պ����I(l��ng)��õ��ˏV����(y��ng)�á���������ͬ��늄�(d��ng)�C(j��)��һ��(g��)��׃������(qi��ng)��ϡ��Ǿ��ԡ�׃����(sh��)�ď�(f��)�s��(du��)����ˣ�Ҫ��(sh��)�F(xi��n)ϵ�y(t��ng)�����ܿ��Ƶ��P(gu��n)�I���ڽ�����ơ�Ŀǰ������������ͬ��늄�(d��ng)�C(j��)�{(di��o)��ϵ�y(t��ng)�Ľ�����Ʒ�����Ҫ�У�ʸ������[1,2]��ֱ���D(zhu��n)�ؿ���[3��4]���֎Π�B(t��i)��������[5]�������澀�Խ������[6]���ȡ�ʸ�����ƌ�(sh��)�F(xi��n)����һ�N��(w��n)�B(t��i)���ƽ���H��(d��ng)����_(d��)����(w��n)�B(t��i)�����ַ�(w��n)���r(sh��)���D(zhu��n)���c��朲ŝM������P(gu��n)ϵ����ˣ����(d��ng)�B(t��i)푑�(y��ng)����߀�������˝M�⣻ֱ���D(zhu��n)�ؿ����������D(zhu��n)�غʹ�朜��h(hu��n)��(l��i)��(sh��)�F(xi��n)��(d��ng)�B(t��i)��������ڵ������ܲ�D(zhu��n)���}��(d��ng)���ȱ�ݣ��֎η����m��ȡ��ϵ�y(t��ng)
�ľ��_���Ի���ݔ��ݔ���u���������Ҫ�õ�������֎�֪�R(sh��)�������ϑ�(y��ng)����һ�����y����ϵ�y(t��ng)��������������������ֱ�^����(sh��)�W(xu��)������(ji��n)�����˵ȃ�(y��u)�c(di��n)�����ڶ�׃����������еõ���(y��ng)�ã�������늙C(j��)����(sh��)׃���������Ժ��m��(y��ng)�Բ����룬��ؓ(f��)�d�_����������(qi��ng)��ȱ�c(di��n)�������(l��i)���F(xi��n)����(j��ng)�W(w��ng)�j(lu��)��ϵ�y(t��ng)������Ʋ���[7-9]�����ڼ������ϵ�y(t��ng)�ľ��Ի���������c(di��n)����(j��ng)�W(w��ng)�j(lu��)[10.11]��(du��)�Ǿ���ϵ�y(t��ng)�ƽ���������(du��)ϵ�y(t��ng)����(sh��)׃�����m��(y��ng)��������һ��Ǿ���ϵ�y(t��ng)�ľ��Ի�����������ѵõ����\(y��n)�á�
�����(sh��)�Ǿ���ϵ�y(t��ng)����(j��ng)�W(w��ng)�j(lu��)�������ƶ��Dz����x��Ӗ(x��n)���ķ�ʽ��һ��Ӗ(x��n)����ə�(qu��n)ֵ���ɸ�׃��������ͬ��늙C(j��)�ڌ�(sh��)�H�\(y��n)���У���늙C(j��)ؓ(f��)�d������(sh��)׃��Ӱ��^���@��Ӱ�ͨ�^(gu��)�x��Ӗ(x��n)������(j��ng)�W(w��ng)�j(lu��)��(du��)��ϵ�y(t��ng)�ƽ��ľ��_�ԣ�ʹϵ�y(t��ng)����ƫ�x�A(y��)��Ŀ��(bi��o)������ᘌ�(du��)����ͬ��늙C(j��)�D(zhu��n)�ٺͶ��Ӵ��֮�g������ԣ�����˻�����(j��ng)�W(w��ng)�j(lu��)�ھ����R(sh��)������ͬ��늙C(j��)��ϵ�y(t��ng)������Ʋ��ԡ������pBP��(j��ng)�W(w��ng)�j(lu��)�Y(ji��)��(g��u)���ڿ����Է����Ļ��A(ch��)�ϣ������o�B(t��i)��(j��ng)�W(w��ng)�j(lu��)�ӷe������(g��u)�������ͬ��늙C(j��)����ϵ�y(t��ng)�������(d��ng)�B(t��i)����ɶ��A�����D(zhu��n)����ϵ�y(t��ng)��һ�A���Զ��Ӵ����ϵ�y(t��ng)��ͨ�^(gu��)�x���W(xu��)��(x��)Ӗ(x��n)���õ���(j��ng)�W(w��ng)�j(lu��)�ij�ʼ��(qu��n)ֵ�����cԭϵ�y(t��ng)��(li��n)��(g��u)����(j��ng)�W(w��ng)�j(lu��)���������Ȼ��������ͬ��늙C(j��)��(sh��)�H�\(y��n)���У�������ͬ�Y(ji��)��(g��u)����(j��ng)�W(w��ng)�j(lu��)�ھ��ƽ�����ϵ�y(t��ng)������һ��(g��)�ɘ����ڰ��ھ����R(sh��)�õ��ę�(qu��n)���x�o��(j��ng)�W(w��ng)�j(lu��)���������ͨ�^(gu��)������{(di��o)����(j��ng)�W(w��ng)�j(lu��)��������ę�(qu��n)ֵ��(l��i)���õ،�(du��)ϵ�y(t��ng)�M(j��n)�н�����ơ��ڴ˻��A(ch��)�ϣ����þ���ϵ�y(t��ng)��Փ�M(j��n)�оC�ϣ�����(g��)����
ϵ�y(t��ng)��(du��)ģ�ͅ���(sh��)��׃�����^��(qi��ng)�������ԣ�����ԇ�(y��n)������ԓ���Ʋ��Ե���Ч�ԡ�
1��(sh��)�W(xu��)ģ�ͼ������Է���
1.1����ͬ��늙C(j��)�Ĕ�(sh��)�W(xu��)ģ��
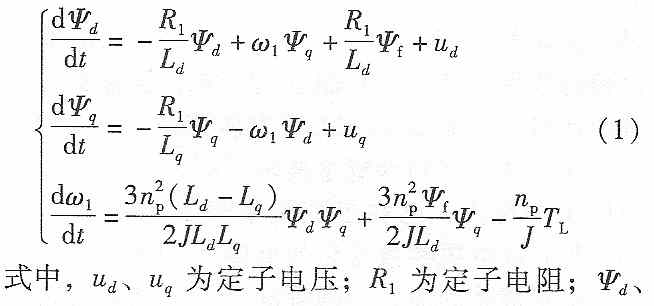
����ڌ�(du��)����ͬ��늙C(j��)��(sh��)�W(xu��)ģ�͵ķ����������¼��O(sh��)��(1)���Կ��g�C�����O(sh��)����y(t��ng)�M�ڿ��g�ό�(du��)�Q���ã����a(ch��n)���Ĵń�(d��ng)��(sh��)�ؚ�϶�A�ܳ����ҷֲ���(2)����늙C(j��)�F�ķǾ����Ӱ푣��J(r��n)���@�M�Ըкͻ��к㶨��(3)�����F�ēp�ģ�(4)�����]�l�ʺ͜ض�׃����(du��)�@�M����Ӱ푣�(5)�����D(zhu��n)�ӵ������@�M��
��d��q���D(zhu��n)����(bi��o)ϵ�£�����ͬ��늙C(j��)�Ą�(d��ng)�B(t��i)ģ�Ϳ����������A�ַ�������[12]��
ʽ�У�uduq�鶨��늉���R1�鶨����裬��d����q�鶨�Ӵ�朣���f���D(zhu��n)�������w��朣�Ld��Lq�鶨���ԸУ���1���D(zhu��n)�ӽ��ٶȡ�
�@ϵ�y(t��ng)��ݔ�����D(zhu��n)�ӽ��ٶȺͶ��Ӵ�朷�ֵ��ƽ�����tϵ�y(t��ng)��ݔ�����̞�
|