�Б�늙C�ŷ���ϵ�y���m�������о�
κ��1���S���x2�����³�3
��1�A�пƼ���W늚�WԺ����h430074��2��h�I���g�WԺ���ϵ����h430074
3��h�P���Ƽ��lչ����˾����h430074��
ժҪ��ᘌ����y�Б�늄әC�ŷ���ϵ�y��λ���c�ٶ���hPI���ƵĽY�����s���p�]�h��ϼ��������Ȳ��_���Ԕ_�������Բ�Ć��}����ֱ���D�ؿ�����Փ���Б�늄әC���D���c��朽���Ļ��A������˻��ڄӑB�W�j�����m�����Ʒ����������˿���ϵ�y�Y���������S���ŷ���ϵ�y���\�й��r����׃����ϵ�y�ĽY�����������������ŷ���ϵ�y������׃���������ԣ�ͬ�r��Ҳ�^�õظ������ŷ��ӿ���ϵ�y�ĄӑB�����B���ܡ����ͨ�^�����C��ԓ����ϵ�y����Ч�ԺͿ����ԡ�
�P�I�~���ŷ���ϵ�y���Б�늄әC�����m�����ƣ��ӑB�W�j��ֱ���D�ؿ��ƣ���������
�ЈD���̖��TM273+2��TM343 �īI��־�a��A ���¾�̖��1001-6848 (2010)01-0029-04
0�� ��
�ŷ���ϵ�y���Q���ŷ���y����һ�N�ԙCеλ�û�Ƕ�������ƌ�����Ԅӿ���ϵ�y�������ŷ�ϵ�y�������õ��ԃr�ȣ��õ��ˏV���ؑ��ã�����Ҫ���_��λ�Ĺ��I�b�䡢���a����ľ�ļӹ���������ӡˢ���ИI���ѽ��ɞ齻���ŷ�ϵ�y����Ҫ�����I�����_��푑��Q����λ���_���ŷ�����ϵ�yһ������ٶȡ�λ�ú���������]�h�Ŀ��ƽY�������y�Ŀ��Ʒ������H���ƽY�����s���������ڸБ�늙C��ϵ�y�ǷǾ��Զ�׃���r׃��ϵ�y�����y�_����ˇ��Ҫ��[3��4]���������ڻ�ϻ�ģ׃�Y�����D���c��朿��ƵĻ��A�ϣ�����˻����W�j���m�����������ŷ���ϵ�y��
1 �Б�늙C�ŷ�ϵ�y��ģ������
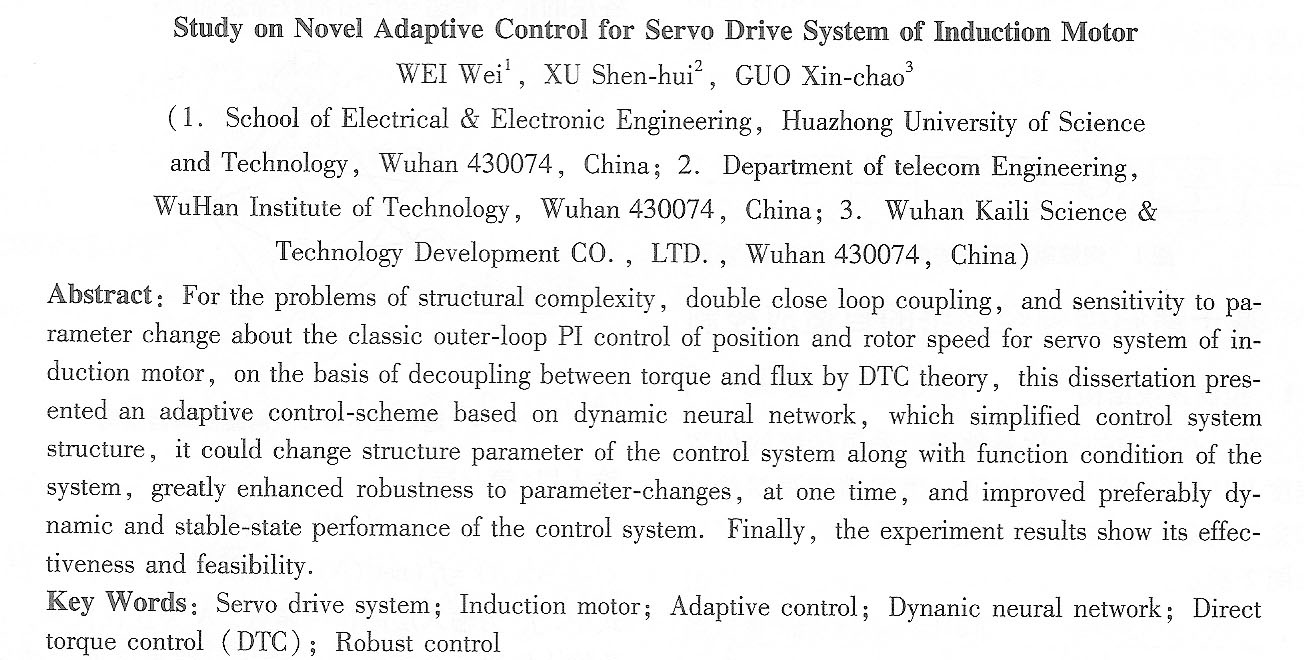
�D���c��朿�������ȭh�����ٶȼ�λ�ÿ���������h����ֱ���D�ؿ�����Փ��֪���D���c��朵ăȭh���ƿ��Ԍ�ϵ�y�����һ�����εľ���ϵ�y�������Ӵ�朶���ͬ���D�ك�������ϵd�S���鶨�����ˣ������Sϵ�������Ӵň����t���Ӵ���������Pϵʽ��  ���īI[3]���Cе�\�ӷ��̣����Եõ��Б�늙C�ŷ�ϵ�y��ģ�ͱ�ʾ���£�
ʽ�У�J�D�ӑT����B����ϵ������r�D��λ�ã�T1ؓ�d�D�أ�Te늴��D�أ�Kt�D��ϵ����isq����������D�ط�����
���Ӵ���O�Þ�㶨ֵ�����Ӵ�朵Ŀ����x�����_�h�Ŀ��Ʒ�ʽ��������Զ��Ӵ�朵ĕ��B�^�̣��@����ϵ�y���Ժ�����ֻ���Զ���������S����i������ݔ��Ķ��A����ϵ�y��ݔ��׃����U�������ϵ�y�ęCе�\�ӷ���ʽ(3)����
����
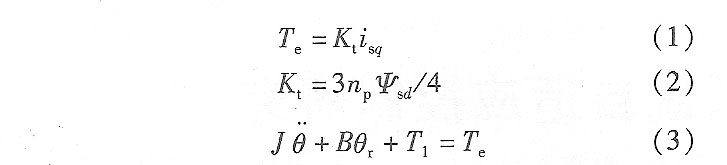
��ˣ��ŷ��Б�늄әC��ϵ�y�ĽY����D��Dl��ʾ������ؓ�d�D������һ���_�Ӽӵ�늴��D���ϡ�
2�����f�w���W�j�����m������
2.1����ϵ�y�Y��
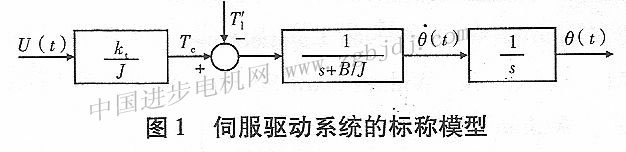
�ڛ]�Д_�ӵĘ˷Q�l���£����Â��y��λ���ٶ�PID������[5]��ϵ�y���Եõ��M���ۙ���Ⱥ����õĄӑB푑����ԣ������ϵ�y�ĽY����D
��D2��ʾ��
���H�����еą���׃����ؓ�d�_�Ӽ�λ�íh�c�ٶȭh֮�g�ĄӑB����Pϵ����������PID����ϵ�y������׃������ڟo���õ��M��Ŀ��ƾ��ȡ����˽�Q�@�����}��ͬ�r��������ϵ�@�Y�������IJ����f�w��С���W�j������( RWNC)����λ�á��ٶ�PID�������������ϵ�y��D��D3��ʾ��
|