�����D�Ӵň�����ğo�S�Ю���
늙C��ϵ�y�������
���࣬���t�d
(���K��W늚���Ϣ���̌WԺ�����K悽�212013)
ժҪ��Ԫ�S�Ю���늙C��һ����׃��������ϡ��Ǿ��Ե�ϵ�y�������o�S�Ю���늙C���\�ЙC�����ƌ������D���͏���Ҹ������̣������˻����D�Ӵň������늙C�Ġ�B���̣�������B���̷���ϵ�y�Ŀ����ԣ����æ��A��ϵ�y�ķ������F�ˏ���Ҹ����c���D��֮�g����ͬ�Ҹ���֮�g�ĄӑB��������þ��ԾC�Ϸ����OӋ��ϵ�y���]�h������������Y��������ϵ�y�������õĄӡ��o�B���ܡ�
�P�I�~���o�S�Ю���늙C���D�Ӵň�������ϵ�y���������
0 �� ��
�o�S�Ю���늙C��һ�N��׃��������ϡ��Ǿ��Եı���ϵ�y�������D���͏���Ҹ���֮�g������Ҹ���֮�g�����������s�ķǾ�������Pϵ��Ҫ���F�D�ӷ����Ҹ��Ϳɿ����D����회�늙C�M�зǾ��ԄӑB������ơ�Ŀǰ�������⌦�o�S�Ю���늙C�Ľ������ʸ�����ơ��֎Π�B�������ơ���ϵ�y������Ƶȡ�ʸ�����ƌ��F����һ�N���B���ƽ���H������_�����B�����ַ����r���D�ٺʹ�朲ŝM������Pϵ���֎η����mȻ���Ԍ��Fϵ�y�ĄӑB�������׃�Q�����I���ӑՓ���Ҕ��W�����ஔ���s�ͳ��������գ���ϵ�y������һ�Nֱ�ӷ������Ի��ķ���������������������ֱ�^�����W�����������˵ȃ��c���m����һ��Ǿ���ϵ�y���о����īI[4��5]���Dz�����ϵ�y����ķ��������䶼�ǽ��������D����ϵ�µģ����õĔ��W��ʽ����һ���ԣ�����^�̱��^���s��
������Ŀǰ�����īI�Ļ��A�ϣ����]���o�S�Ю���늙C��ģ���^����s����r�£���ϵ�y�M�����D�Ӵň�����ͬ�r���æ��A��ϵ�y��Փ�������˻����D�Ӵň�����ğo�S�Ю���늙C�����Aģ���M�н�����ƵĿ����ԣ��M���˄ӑB������Ʋ��Ե��о���
1 �o�S�Ю���늙C�������
1.1 �o�S�Ю���늙C�Ĺ���ԭ��
�o�S�Ю���늙C�Ķ����з����˃��ײ�ͬ�O�������@�M��һ�מ��D�ؿ����@�M(�O����P1��늽��l��w1)����һ�מ�Ҹ������@�M(�O����P2��늽��l��w2)��ֻ�Ю��D�ؿ����@�M�O�����c�Ҹ������@�M�O�����M��P1=p2��1����늽��l��w1=w2�r�����ܮa���ɿؑҸ������D�ؿ����@�a���Ĵň��nj��Q�ֲ��ģ�������Ҹ������@�M�r��������늙Cԭ���D�ň���ƽ�⣬ʹ�úϳɵĚ�϶�ň���ijһ�^�����������䌦�Q�^��ň��p�����ɂ��ň�����îa���˿ɿص�����˹�f����
1��2��������늴��D�غ��D�Ӵ�朷���
��is1d��is1q��is2d��is2q����ʾ�D�ؿ����@�M����͑Ҹ������@�M�����
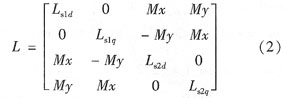
�@�M�д惦�Ĵ��ܱ��_ʽ�飺
����
Ls1d��Ls1q��Ls2d��Ls2q�����քe���D�ؿ����@�M�͑Ҹ������@�M��d��q�S�ԸУ�
M���������D���@�M�c�Ҹ��@�M֮�g�Ļ���ϵ����
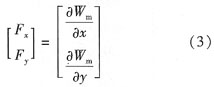
����̓λ��ԭ����늴����ɱ�ʾ��늴Ń��܌�λ�Ƶ�ƫ���������x��y����ĿɿؑҸ���Fx��Fy�ɱ�ʾ�飺
��ʽ(1)����ʽ(3)�ã�
�o�S�Ю���늙C��늴��D�ط��̞飺
ʽ�У�Lr�����D���ԸУ�
Ls1r�����D�ؿ����@�M�c�D��֮�g�Ļ��У�
��rd����rq�������D�Ӵ����d��q�S�ķ�����
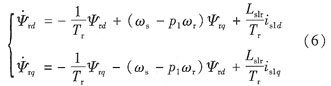
�o�S�Ю���늙C���D�Ӵ�朝M�����·��̣�
ʽ�У�Tr�����D�ӕr�g������Tr=Ls1r/Rr��
ws����d-q����ϵ�����ڶ��ӵ����D���ٶ�,ws=p1wr+w��
w����d-q����ϵ�������D�ӵ����D���ٶȣ�
|