늄�܇�øБ�늄әC��ϵ�y�OӋ
���㣬������������
(�����I���I��W���V�|����518055)
ժҪ������늄�܇��늙C�ӿ���ϵ�y�ļ��gҪ���OӋ��һ������Б�늄әC������ԓ��������һ�N�����\���ʸ�����Ʒ���������˿���ϵ�y�������ԡ����������������ɝM��늄�܇�ĸ߹����ܶȡ����D�١����لӑB�{�����ܵȼ��gָ�ˡ�
�P�I�~���Б�늄әC���D�ӕr�g������늄�܇��ʸ������
�ЈD���̖��TM346 �īI���R�a��A ���¾�̖��1004-7018(2008)07-0045-02
0�� ��
늙C������ϵ�y��늄�܇�ĺ��IJ��֣����w�F��һ�����ҵ�늙C����ˮƽ�Ϳ���ˮƽ���������@���������˶�����о���Ŀǰ����һЩ����Ŀ���ϵ�y�������ȃH�ڽ����������ԓ�I��[1-3]��늄�܇����늙C�ɷ֞�����ͬ��늄әC������늄әC���Б�늄әC�ȶ�N����\ʽ�Б�늄әC����Ѓr��͡��S�o���Ρ��Y���w�eС�ȃ��c��������늄�܇�I���б��V�����ã����ĵ��ӿ���ϵ�y����ᘌ�ԓ�N늙C�OӋ�ġ�����늄�܇ϵ�yҪ��늙C���Ʋ��֑������^�ߵĄӑB푑��ٶȼ��^С���o�B�`���˱����ڹ���ݔ�����ֲ����˴���IGBT������׃��ĽY��[4]������IGBT���_�P�l�ʿ��_��10kHz������ߌ�IGBT�ӵĿɿ��ԣ����·������ģ�K��ʽ�������܌��F�^���s�Ŀ����㷨������̎�����x��TI��˾���T����늙C���Ƶ�DSPF2407AоƬ���ڌ��Б�늄әC�Ŀ��Ʋ��Է��棬���ڴň�����ʸ�����Ʒ����lչ�ñ��^���죬��������ܿɝM��늄�܇ϵ�y��Ҫ����˱��IJ�����ԓ��������������늙C����׃��������ϵ�y���ܵ�Ӱ푣���ϵ�y������һ�N���M�ĺ����\��Ĵň���������㷨[5,6]��
1 �Б�늄әC��ϵ�y
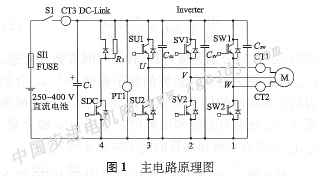
����늄�܇�Ĺ���Դ���늳أ�������Б�늄әC��Ҫ�Ĺ����Դ���������Q�����{���{�l�������Դ����ˣ���늙C�����б�횰�ֱ���Դ��׃�����ཻ���Դ�����ĵ�늄�܇늙C��ϵ�y���·�Y����D1��ʾ������Б�늄әC���~�����ʞ�23 kW����ֵ���ʿ��_60 kW��܇�d�늳ص��~��ݔ��늉���310 V��ϵ�y���S늉�����������250��350 V��
�D1����1��2��3���ֽM��������ۣ���ͨ�^����IGBT������̖���F��ֱ��ĸ��늉��D�Q����������PWM�}�_���΄գ���֮���ڄx܇�Ƅ����g��Ҳ�Ɍ����������������l������ʹ�ã�����늙C�l������������늉��D�Q��ֱ��늉����Ķ���늳��M�л�����늡��D�е�4���֞��������������·�������Ը���늳�늉��ľ��w��r������늳س������Ĵ�С�����IJ���IcBT����������׃��Ĺ��ʆ�Ԫ�����~�������300 A��****���_400A(�͜�)���͉���1 OOO V��IGBT���Ӻͱ��o�·�������cIGBT������ģ�K��ÿ��ģ�K����һ����ۣ����Ҹ���ģ�K�ɹ���һ�����Դ���@�O��غ��������·���OӋ�������ϵ�y�Ŀɿ��ԡ�
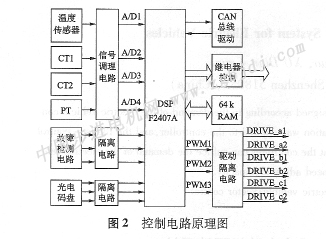
�D2������·ԭ��D�������·�ĺ��IJ��Ô�����̖̎����DSP-F2407A����DSP��늉���������ضȡ��D�١����ϵ���̖�M�Йz�y�c̎����ͬ�r��߀�ɮa��PWM������������̖������ͨ�^CAN�����c܇�d����������ģ�Kͨ�š�
2 ���Ʋ���
���IJ��ôň�����ʸ�����Ʒ����������īI[5��6]�е�늙Cģ�ͣ�
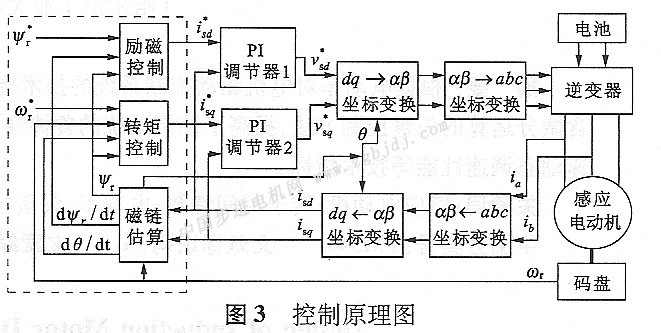
����ϵ�y�Ĺ���ԭ����D3��ʾ�����У�̓����ă��ݞ鱾���㷨�ĺ��ģ���ſ��Ʋ�����ʽ(1)��ɣ��D�ؿ��Ʋ�����ʽ(2)��ɣ���朹��㲿����ʽ(3)��ʽ(4)��ɡ�
3 ���Y��
�������õ���\ʽ����Б�늄әC�ą����飺�~��ݔ������23 kW���~��ݔ�� |