�o�ٶȂ�����������ͬ��늄әC��ģ����
��Y1,2�����P��1�����S1
(1�Ї��V�I��W�����K����221008��2���K��W�����K悽�212013)
ժҪ�����÷��ݿ�����Փ����������ͬ��늄әC���ٶ��^�y�������\�û�ģ׃�Y��������Փ�OӋ��ϵ�y���Ʋ��ԡ�ԓ�������ã����ݿ��Ʒ����ԏ����ӡ��o�B���܃��������c���OӋ���^�y���Y�����Ρ����ȸߡ������Ժá�ʹ�û�ģ������Փ�]Ӌϵ�y���w���Ʒ�����������Ч����ؓ�d�ͅ���׃�������Ĕ_�ӣ��Ķ������ϵ�y�������ԡ�����������Ŀ��Ʋ����M������Փ����������ͨ�^Matlab�M�з��挍�һ����Y��������ԓ���Ʒ�����Ч�،��F��늙C���D�ٸ�ۙ���������õĄӡ��o�B���Ժ������ԡ�
�P�I�~��ˮ��ͬ��늄әC���o�ٶȂ���������ģ���ƣ����ݿ���
�ЈD���̖��TM34l �īI���R�a��A ���¾�̖��1004��7018f2��9)12��0045��03
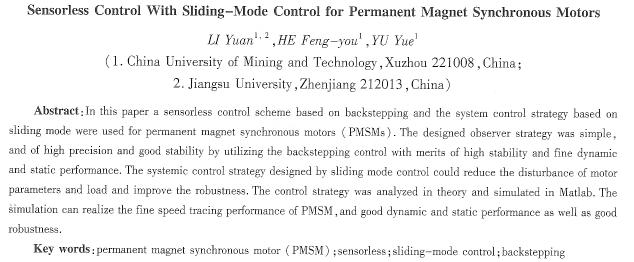
O�� ��
����ͬ��늄әC(���º��QPMsM)�����w�eС���Y�����Ρ��ɿ��Ըߡ��{�����܃����������ԏ��ȃ��c�����V�������ڸ��N�߾����{�ٿ���ϵ�y�С�Ȼ��������PMsM�{��ϵ�y�����ķǾ����Լ�늙C�������ʴ_�����أ�ʹ�Ì��䌍�F�߾��ȿ��Ƴɞ�һ�����s�Ć��}��
�o�ٶȂ����������ǬF�������{�ٵ�һ����Ҫ�lչ����Ŀǰ���ЌW�ߌ��Uչ�������V����ģ�ͅ������m�������lע����W�j�ȿ��Ʒ���������PMsM�Ŀ����У�����ȡ�����^�õ�Ч��[1]��
���IJ��÷��ݿ��Ʒ����OӋ��������PMsM���D���^�y�������ڷ��ݿ��ƾ��з����ԏ����ӡ��o�B���ԃ��������c����˻���ԓ�����OӋ���D���^�y�����о��ȸߡ������Ժá��ӑB����Ѹ�ٵȃ��c�����⣬�������ϵ�y����늙C����׃����ؓ�d׃��������Ӱ푣�ϵ�y�Ŀ��w���Ʋ��Բ��û�ģ׃�Y�����ƣ��Ķ���Ч�������ϵ�y�Ŀ��ɔ_����������Ԕ��������������Ŀ��Ʋ��ԣ���ͨ�^������C�˿��Ʒ�������Ч�ԡ�
1 PMsM���Wģ��
���IJ��õ�PMsM���Wģ����ͬ�����D�D�����˞���A�����Ҽ��O����ֱ�S늸���ȣ���Ld=Lq=L[2]��
ʽ�У�ud��uq��d��g�S����늉���id��iq��d��q�S���������R�鶨����裻L�鶨��늸У�TL��ؓ�d�D�أ�J���D�ӑT����B��ճ��Ħ��ϵ����P��O�������؞��D�әCе���ٶȣ���f�����Ŵ�ͨ��
2����ϵ�y�OӋ
���ڶ������ֱ�S�����o�����㣬���Զ��x[3-6]:
3 �o�ٶȂ������OӋ
ϵ�y�ٶȦص�ֵʹ�÷��ݿ��Ʒ�������@��. ��:��=��-��,�؞�늙C�D�ٵ��^�yֵ,�؞��^�yֵ�c���Hֵ���`��[7].
���÷��ݿ��Ʒ������x�ӿ���ϵ�y��Lyapunov����:
4ϵ�y�������
ϵ�y���w��D��Dl��ʾ������늙C�����飺�������R=3�����O����p=2���D�ӑT����=O��001kg.m2�����Ŵ�ͨ��f=0.8 wb������늸О�L=0.006 H��ճ��Ħ��ϵ����B=O��000 l��
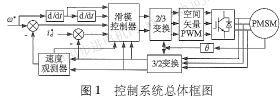
���ڿ�������Ҫ�ٶȽo����̖��һ�����A������˷���ϵ�y�в�������D2��ʾ�ķ�����ƽ����ݔ���A�S�o����̖����һ�����A����̖[8]���D��a1=8 500��a2=0��02��
�����������P����ȡ��:��1=50;��2=80;c=l 500����=O��1 �D3������ϵ�y�D�ٸ�ۙ�A�S�o�������ܡ���t=0��3 S�r���o���D����100 r��min����120 r��min����t=0��6 s�r���o���D����120 r��min����130 r���ĈD3a�п��Կ���ϵ�y�ܾ��_�ظ�ۙ�o���D�١��D3b���ϰ벿�ַ�ӳ�˹�Ӌ�D���c�o���D�ٵ��`��°벿�ַ�ӳ�˹�Ӌ�D�ٺ͌��H�D��֮�g
���`�
|