����ģ���������Į���늙Cʸ������ϵ�y
�S���A���M�꼯�F��늙C����˾���㽭�|�322118��
ժҪ��������ģ����������ԭ���Լ�����ģ���������Į���늙Cʸ������ϵ�y���OӋ��ᘌ����yPlD���ƴ��ڵIJ��㣬�����߶˔�����̖̎����TMS320F2812����ģ�������������c���gʸ���}���{��(SYPWM)����ϵ�y��Ч�ؽY����һ�𣬿���ϵ�y�����ܵõ����^����ƣ�����ָ�����@���ڂ��yPID���ƣ��M�������ˮ���늙Cʸ�����ƵĄӑB���ܡ�
�P�I�~��ģ��߉���ň�������ƣ�����늙C��������
�ЈD���̖��TM301.2: TM343�īI���R�a��A���¾�̖��1673-6540( 2009) 12-0022-04
0�� ��
�S�����N������̎���������ܿ����㷨�IJ����Ƴ��������ˮ���늙C����ϵ�y�İlչ������늙C�ň���������ѽ��ڹ��I���д����đ��á��ň����������ͨ�^����׃�Q�ķ�������������ֽ�Ʉ�����isd���D�����isq�����{�ٵ��^���б����D�Ӵ�朦�2��׃����isd�鳣�����˕r������늙C������ֱ��늙Cһ���`����ơ����Ǯ���늙C�ň�������������D��r�g����׃����Ӱ푣��Y���Ɖ����D�صĄӑB푑�������ϵ�y�����ܡ����������@һӰ푣��˂������о������ھ���Ӌ�D�ӕr�������ķ��������@�N�����������D���c�D��֮�g���Pϵ��
�{��ϵ�yͨ������PID����������ϵ�y���܇��ؔ_�ӕr�������������̶���ʹ��ϵ�y����Ҳ�����½����ڌ��H���a�F�������ڸ��N���أ������ϵ�y�Ă��f�����c���H��ƫ��τ�ؓ�d�ą���������ģ���ǘ�һ�ɲ�׃��ͬ�r��늙C������һ���Ǿ��Եı��،����S���τ�ؓ�d���Џ��Ի��g϶�ȷǾ������ء�1�������ʹ�Â��y��PID�������ą��������y���_��****��B������PID�ą����������ܸ���ϵ�y�����׃��څ�ݲ�����M���{����
�����Mһ����߿�����������ˮƽ����߿���ϵ�y�ĄӑBƷ�|�������yPID�������cģ�����Ƽ��g��Y�ϣ��OӋ��ģ��PID������������������1�����c��Ҏ��PID������ȣ�����ģ�����Ʋ���Ҫ���_�Ĕ��Wģ�ͣ������ճ����a�еĽ��Ҏ�t�ӑB��ݔ�������ڽ�ή���늄әC����׃���c�Ǿ������Բ����ϵ�y�\�еķ���������Ҫ�Ľ��b���x��
1 Fuzzy-PID���������OӋ
�S��̎�������g�İlչ���˂������˹����ܵķ����������ˆT�Ľ������֪�R����̎�����У������F���Č��H��r��̎�������Ԅ��{��PID�ą������@�Ӿͳ��F������PID��������ģ��������Փ���ý�Q�˱����ƌ���ą���׃���c�Ǿ��������Լ������߽����_�����Ȇ��}���˂�����ģ�����W����Ҏ�t�ėl�������P��Ϣ����֪�R����̎����֪�R���У�Ȼ�����ϵ�y����ݔ��l���\��ģ�������������Ԅӌ��F��PID������������****�{�����@����ģ���T����PID���ƿڡ�
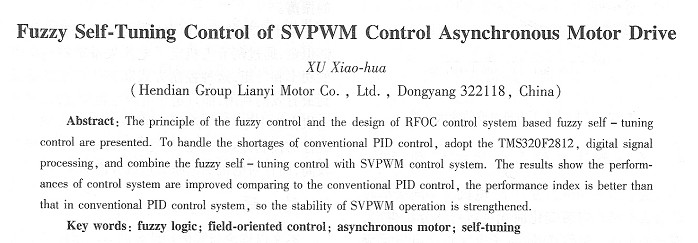
��ģ���������ĽY�����Ã�ݔ���ݔ���ĽY���������õ�ģ��Ҏ�t���l��ʾ���ϳ������㷨����Mamdani�������ɂ�ǰ��l��ȡ��С�����ӣ��YՓ����ȡ****�����ӡ���ģ���������ķ�( COA)��3�����Dl�o����im1��ģ���������ķ���ģ�͡�
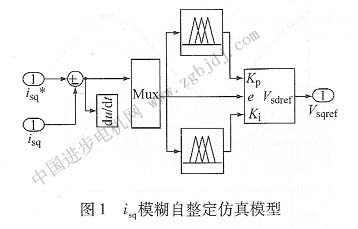
�D1��isq����ʾݔ��ָ��ֵ��Vsqref��ʾݔ��ֵ��ƫ��ֵ��ƫ��׃��ֵ�քe�ͽoPIģ�K��ģ��߉ģ�K���������~����朵Ľo��ֵisd�鳣ֵ���o��isq��PI���Ƶ��ⲿ�ٶȭh�a����ģ��isq���ƭh��MF��D2��3��ʾ�����е�ģ��׃�����`��e���`��׃��ce��ݔ��׃��cu���Ԙ��ۻ�����ʽ�o����
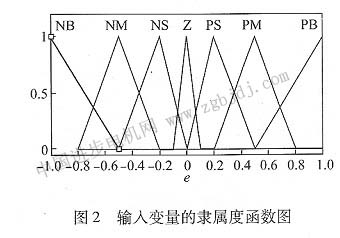
��ģ�����������OӋ��ģ��������Փ�Č��H�����У�ͨ����e��c e����ݔ��׃�������^�xɢ����ģ�������ԃģ�����Ɔʣ��õ�ģ��ݔ��������c u��Ҫ���ģ���������ľ��Ⱥ�ۙ���ܣ������������Z��׃�����ȡ������Z��ֵ���֙nԽ��������Խ�á���˱��OӋ��ģ������������NB��ؓ��NM��ؓ�У���NS��ؓС����Z���㣩��PS����С����PM�����У���PB�������߂�ģ���Z��߉׃����ģ����ݔ��ƫ��׃��e��ݔ��ƫ��׃����c e����NVB��ؓ�dz���NB��ؓ��NM��ؓ�У���NS��ؓС����NVS |