����ͬ��늙C��ģ����ģ����
�Sʯ�S���܇��s
(���ϴ�W��Ϣ�ƌW�c���̌WԺ�������Lɳ410083)
ժҪ�����ˌ��F����������ͬ��늄���ŷ�ϵ�y���ٶ����_��λ�ø�ۙ���ƣ��ڻ�ģ���Ʋ���������ģ�������㷨�OӋ�˻���ģ��Ҏ�t�Ļ�ģ���Ƈ̣�ͨ�^��Փ�����Ϳ��Ʒ��棬�C����ģ����ģ���ƺܺõؽ�Q�˶����}��������׃����ؓ�d�n�Ӿ����^���������ԣ�����ͬ��늙C�ɫ@�Ã�����λ�ø�ۙЧ����
�P�I�~����ģ���ƣ�ģ�����ƣ�����ͬ��늙C��ģ��Ҏ�t
�ЈD���̖��TP27 �īI���R�a��A
1 ����
����ͬ��늄әC�������w�eС��Ч�ʸߡ��Y�����οɿ����D�ش�������ԏ��ȃ��c�����V�������ڸ߾���λ�ÿ��Ƶ��ŷ�ϵ�y����PMSM����һ����׃�����Ǿ��ԡ�����ϵ�ϵ�y�����˿˷��@Щȱ�c���ѽ�������S���������_����Ӱ푵Ŀ��Ʋ��ԣ�Ȼ���������Եò������C�����������ģ�������ڿ��ƽY�����Ρ������ԺͿɿ��Ըߣ��ʱ��V���ؑ������\�ӿ����У������ѽ�ȡ���˺ܶ��г�Ч���о��ɹ������ǣ��������}�ɞ黬ģ���������õ��ϵK�����Č�ģ�����ƺͻ�ģ������Y�ϣ�����ģ��Ҏ�t�����û�ģ���_�l�����ГQ�����M�й�Ӌ�������ГQ���������ɔ_헣��Ķ���������ʹ��PMSM�ŷ�ϵ�y��ؓ�d�ɔ_�ͅ���׃�����кܺõ������ԡ�
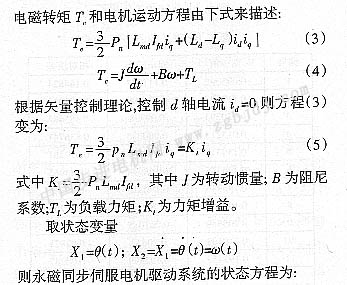
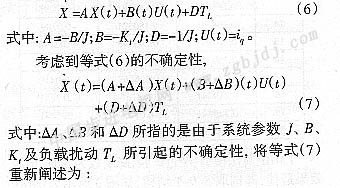
2 ����ͬ��늙C�ŷ�ϵ�y���Wģ��
�������ҸБ���늄ӄݵ�����ͬ��늙C�Ĕ��Wģ�����£�



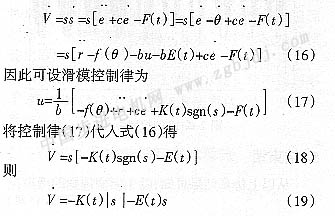
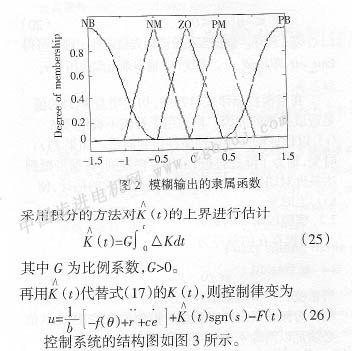
�ڻ�ģ������ʽ(17)�У��ГQ����K(t)��ֵ����ɶ����ԭ��K(t)�����a�����_���E(t)���Ա��C��ģ�����ԗl���õ��M�㡣���E(t)�r׃���t���˽��Ͷ�����ģ��Ҏ�t��������ģ���_�l�����ГQ����K(��)��ֵ�M����Ч�Ĺ�Ӌ��ʹK(t)Ҳ�r׃��
3.2ģ�����������OӋ
��ģ���ڵėl���� ss
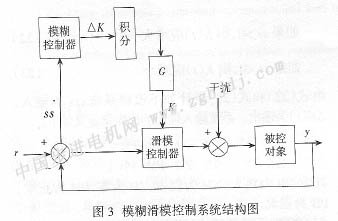
��ϵ�y���_��ģ����������ڻ�ģ���ϡ�����K(t)�鱣�Cϵ�y���Ե��_��ģ������棬�����ֵ��������������_��헵�Ӱ푡�
ģ��Ҏ�t���£�
���ss>0���tK(t)������ (22)
���ss
��ʽ(22)��ʽ(23)�OӋ����ģ��ϵ�y��ss��ݔ�룬��K(t)��ݔ����ϵ�yݔ��ݔ����ģ�������x���£�
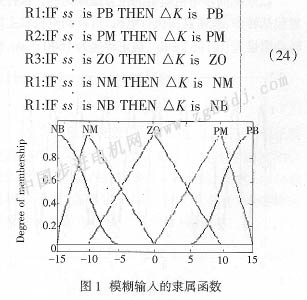
ss={NB NM ZO PM PB }
��K={NB NM ZO PM PB }
����NB��ؓ��NM��ؓ�У�ZO���㣬PM�����У�PB������
ģ��ϵ�y��ݔ���`�ٺ�����D1��ʾ��ģ��ϵ�y��ݔ���`�ٺ�����D2��ʾ���x������ģ��Ҏ�t��
4 ϵ�y�������
������ͬ��늙Cģ�͵�λ�ø�ۙ�����������b�ð����D�_���p�����͈���늙C�����㵽늙C�S�ϵ��D��؞����0.0196 kg���O���~���D�� |



