���ڻ�ģ׃�Y���Į���늙Cʸ�����Ƽ����F
��x�L1��犂���2���S��1
(1.���϶��̌WԺ���ü��g�WԺ��������̶4111O1��
2.�Ї���W������̖�c�D��̎����������c����ң����300300)
ժҪ���_�ӻ�ؓ�d�ļ��댦����늙Cʸ������ϵ�y������Ӱ푣�ʹϵ�y����׃������һ�N�µķ�������B�˻��ڻ�ģ׃�Y���Į���늙Cʸ�����ƣ�����ģ׃�Y������������M�����OӋ���xȡ���m�Ŀ��ƅ������I��c����Y��������ģ׃�Y�����ƵĮ���늙Cʸ������ϵ�y���o�B�������ã������^������������
�P�I�~������늙C��ʸ�����ƣ���ģ׃�Y������
�ЈD���̖��TM343 �īI���R�a��A
1 ����
��������늙C�^ֱ��늙C���ԣ����нY�����Σ�ݔ���D�ش�����c�����ǣ�����늙Cͬ�r����һ����׃��������ϡ��Ǿ��Եĸ��A�r׃ϵ�y[1]������yֱ��ͨ�^�ⲿ��̖��ʴ_������늴��D�أ��@��Ҳ�ͺ��y�m���ڿ��ƾ���Ҫ��ߵĹ��I���ϡ�1971���Bladchke F�����ʸ��������Փ��ͨ�^����׃�Q������늙Cģ�͵�Ч��һ�_ֱ��늙C���������،�����늙C��ʩ����[2]�����yPID���Ʒ�������ʹ�ŷ�ϵ�y�@��һ���Ŀ��ƾ��ȣ���ϵ�y���������ܲ���[3]�����������ģ׃�Y�����Ʒ�����ϵ�y����׃�����ⲿ�ɔ_�������õ������ԣ��ӑB푑��죬���������OӋ�c���F������ͨ�^��ģ׃�Y�����������OӋ���F�ˮ���늙C�������ʴ_�����ٵ��{�١�
2 ����늙C����ģ���c��ģ׃�Y��ԭ��
2.1��ģ׃�Y��ԭ��
��ģ׃�Y������SMVSC)[��׃�Y�����Ƶ�һ�N���Ʒ��������Ŀ���ԭ���Ǯ�ϵ�y��B��Խ��B���g�IJ��B�m����(��ƽ�桢�_�Pƽ��)�r���������ƵĽY���Ͱl��׃������ʹϵ�y��һ���������ؠ�B܉�E��С���ȡ����l�ʵ��\�ӣ���ʹϵ�y�_������������ָ�ˣ����Ү�ϵ�y�M�뻬ģ�\�ӕr��ϵ�y������׃�������_�ӌ���ģ�\�ӎ��]��Ӱ푣����ϵ�y�;������õ����m�����c�����ԡ�
2.2����늙Cģ��
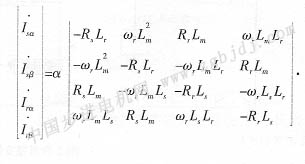
�ڶ����oֹ��������ϵ�£�����늙C��늉�һ���ģ�͵Ġ�B����[5]�����飺

3 ��ģ׃�Y�����������OӋ
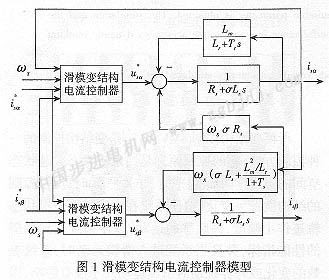
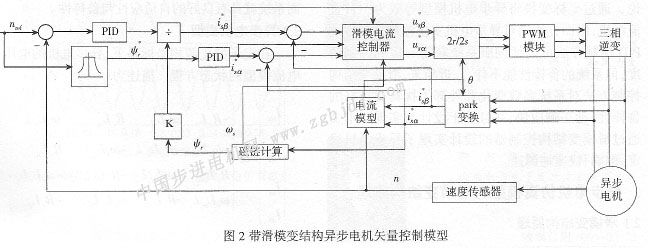
����ģ׃�Y���Ŀ��ƣ����P�I���ڿ��������OӋ�����IJ��û�ģ׃�Y���������������Y����D1��ʾ������ģ׃�Y������늙Cʸ������ģ����D2��ʾ��
���ڻ�ģ׃�Y�����������OӋ�������ɂ����֣�һ���OӋ��ģ�棬ʹ�û�ģ��s=O�������OӋ����ģ�B�����ʣ��Ա��C��ģ��������\���c���������^�̵ĕr�g����ƿ�ص���ģ���ϣ�
3.1 ��ģ��s���OӋ
3.2����ģ�B�����ʵ��OӋ
��������׃�Y�����ƽoϵ�y�����Ķ��ӣ�����xȡ���m�����泣��[5]���ڱ����У����˵õ�ǡ�������攵ֵ��������ָ��څ���ɣ�s=��sgn(s)+ks���_�����泣����ͨ�^�������ʅ����ź�k���{����ʹϵ�y�܉�M���ܵĿ��ٵ��_��ģ�棬�Ķ����Cϵ�y�ķ������c�ӑBƷ�|��
���-�������S�®���늙C�Ľo��늉��M�㣺
���������Z������Փ֪�R���˕r��ԓϵ�y���������Z���飺

��ϵ�y���Է��ػ�ģ�棬��ô�������Z���Č����M���<0������

| 


