�_�P(gu��n)����늙C(j��)�{(di��o)��ϵ�y(t��ng)����h(hu��n)�Ĕ�(sh��)�ֿ���
����ۣ��R־Դ��ղ��?c��)A
(�A��������W(xu��)������ ��h 430074)
ժ Ҫ�����U�����P(gu��n)����늙C(j��)�(q��)��ϵ�y(t��ng)(SRD)����h(hu��n)��(sh��)�ֿ���ԭ���Լ����ɷN���з����M(j��n)�з������^�Ļ��A(ch��)�ϣ������һ�N�µĸ��m���_�P(gu��n)����늙C(j��)�Ļ��ʽ��Q���������քe�õ���(sh��)�(y��n)�Y(ji��)�����Y(ji��)���������_�P(gu��n)����늙C(j��)����h(hu��n)�Ĕ�(sh��)�ֿ��Ʋ��H����ȫ���еģ������^���y(t��ng)��ģ�M�����������ɺ�ҕ�ă�(y��u)�ݡ�
�P(gu��n)�I�~���_�P(gu��n)�����������(sh��)������h(hu��n)��늉�PWM�������ۙ
1 �� ��
SRD����һ�N���d�ĵ���ϵ�y(t��ng)������Y(ji��)��(g��u)���Ρ����Ʒ��㡢�ɿ��Ըߡ��ɱ��͵����c(di��n)����ͬa(ch��n)Ʒ�о��к�(qi��ng)�ĸ��������䝓�����ɹ������ڔ�(sh��)�ֿ����˳��ě_���£�SRDϵ�y(t��ng)Ҳ���яĄ��_ʼ��ȫģ�M������(sh��)�ֿ����D(zhu��n)׃��������ܛӲ���ȸ���������ƣ�����(n��i)�_�P(gu��n)����늙C(j��)����h(hu��n)�Ŀ������f����CPUƬ���ģ�M���ƣ�������h(hu��n)�Ŀ��ƌ��_�P(gu��n)����늙C(j��)���f��һ���P(gu��n)�I������ںܴ�̶���Ӱ���SRD��(y��u)Խ�Ե��M(j��n)һ���l(f��)�]��ͬ�r(sh��)��Խ��Խ�V���đ�(y��ng)���I(l��ng)��Q�����䌦�(q��)��ϵ�y(t��ng)����Խ��Խ�ߵ�Ҫ��������푑�(y��ng)�ٶȺ��\(y��n)�пɿ��ԡ��`���Եȷ��棬�@Ҳ�����y(t��ng)��ģ�M��Q��������˺ܴ������(zh��n)��Ҫ��M���������h(hu��n)�Ĕ�(sh��)�ֻ������@һ������
���꣬��(sh��)����̖̎�����g(sh��)�Ŀ��ٰl(f��)չ�Լ����ɶȸ��ٵ�늙C(j��)���ƌ��Ô�(sh��)����̖̎��оƬ�ij��F(xi��n)ʹ���_�P(gu��n)����늙C(j��)�(q��)��ϵ�y(t��ng)��ȫ�攵(sh��)�ֻ�������������ƵĔ�(sh��)�ֻ��ɞ���ܣ��������@һ���A(ch��)�ϣ���������˃ɷN��(sh��)�F(xi��n)����h(hu��n)��(sh��)�ֿ��ƵIJ��ԣ���ͨ�^��(sh��)�(y��n)Փ�C������^���f���ɷN���Զ��ǿ��еģ����������L�����˵õ������_�P(gu��n)����늙C(j��)���������ܸ��õ�������Σ����������һ�N������֮�L�Ļ��ʽ��Q�������Ķ������SRD��Ч�ʡ����������D(zhu��n)���}�Ӿ��кܴ����x��
2�_�P(gu��n)����늙C(j��)��(sh��)������h(hu��n)�Ļ���ԭ���c�ɷN���Ʋ���
2��1 ����ԭ��
��(d��ng)�_�P(gu��n)����늙C(j��)̎�ڷǸ����\(y��n)�Еr(sh��)���@�M��늄��^С�����粻�ӿ��ƣ�������ԛ_���ܸ�ֵ�����@�N��r�£��������ù̶����@�M�_ͨ���P(gu��n)��ǣ���������h(hu��n)���Ƶõ�һ����С�Ͳ��ε�������Ķ��õ������늙C(j��)���ʡ��D(zhu��n)�غ��D(zhu��n)�ٵȅ���(sh��)����Ŀǰ��Փ�о��Ļ��A(ch��)�ϣ��J(r��n)�鷽����һ�N�m�����_�P(gu��n)����늙C(j��)������������Ρ�
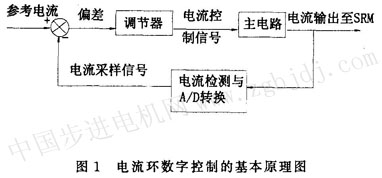
�������h(hu��n)��Ҫ��ɵ��΄�(w��)�DZ��^��(sh��)�H����ͅ������(��������ֵ)��������(j��)���߲����Q��ݔ�����������̖��ʹ��(sh��)�H����M���_(d��)����������ף���׃�������ֵ����׃��늙C(j��)����Kݔ�����ڂ��y(t��ng)��ģ�M�����У����ڶ�N���Ʋ��ԣ�������������ơ������ۙ���ơ�늉�PWM���Ƶȣ��@Щ���Զ������Ô�(sh��)�ֿ��ƌ�(sh��)�F(xi��n)�����ڔ�(sh��)�ֿ����У��@һ�΄�(w��)��Ҫ��ܛ����ɣ����ڌ�ܛ������ʮ���`��㣬�㷨�ćLԇ���Զ�N���ӣ���˔�(sh��)�ֿ��Ƹ��`�����Ч�������_�����_�P(gu��n)����늙C(j��)�������L�����_�˂���һЩ�y�}����������ӣ����п����ṩһ����(y��u)��Ľ�Q����������(sh��)�ֿ��ƺ�ģ�M���ƵĻ���ԭ����һ
�µģ���D1��ʾ��
�@����Ҋ�����Ƶ��P(gu��n)�I�����~��(ji��)���㷨���x���c��(y��u)����Ҳ���������{(di��o)��(ji��)���㷨�Ķ����Ժ��`���ԣ��Q���˔�(sh��)������h(hu��n)���Ʋ��ԵĶ����Ժ��`���ԡ��ڱ����У������U���˃ɷN���Ʋ��ԵĔ�(sh��)��(sh��)�F(xi��n)����늉�PWM���ƺ������ۙ���ơ�
2��2늉�PWM����
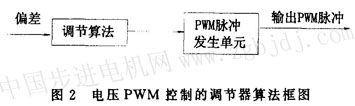
늉�PwM���Ƶĺ���˼���Ǹ���(j��)��(d��ng)ǰ���ڲɘ�����ͅ�������IJ�ֵ�_����һ���ڵ�PwM�}�_�Č�(d��o)ͨռ�ձȡ����ڶ���֮�g���P(gu��n)ϵʮ�֏�(f��)�s��߀�ܸ��N��������(sh��)��늉���ؓ(f��)�d�ȵ�Ӱ푣�����Ҫһ�����^��(f��)�s���㷨������(j��)ݔ��_��ݔ�������_��ϵ�y(t��ng)�������õĄӡ���(w��n)�B(t��i)���ܣ���D2��ʾ��һ����õ��㷨��PID�㷨��ģ���㷨����(j��ng)�W(w��ng)�j(lu��)�㷨�����m��(y��ng)�㷨�ȡ�
2��3�����ۙ����
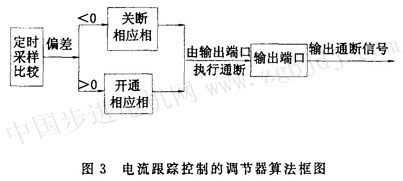
�����ۙ���Ƶ�˼����^���Σ�����(d��ng)ǰ���ڵĿ�����̖����Ҫ��(d��ng)ǰ���څ������������(d��ng)ǰ���ڵą�������c�ɘ������ƫ��С���㣬�t�����P(gu��n)������(y��ng)�����_�P(gu��n)����֮���������_ͨ����(y��ng)�����_�P(gu��n)�����������늉�PWM���ƣ���һ�����ڵ����t�����㷨��D��D3��ʾ��
3��(sh��)������h(hu��n)��ܛӲ����(sh��)�F(xi��n)����(sh��)�(y��n)�Y(ji��)��
3��1ܛӲ����(sh��)�F(xi��n)
��Ӳ�������߲���TI��˾��TMs320F240оƬ����CPU���ā��O(sh��)Ӌ(j��)��(sh��)�F(xi��n)SRM��������Ӳ��ϵ�y(t��ng)���� |