���ڔ�(sh��)����̖̎�����IJ��M(j��n)늙C(j��)�\�ӿ���
�� ������W(xu��)ȫ�����½�
(�Ϻ���ͨ�ˌW(xu��)���Ϻ� 200030)
ժ Ҫ����B���P(gu��n)���M(j��n)늙C(j��)���ŷ��\�ӿ��ƣ��O(sh��)Ӌ���|�ڔ�(sh��)����̖̎�������\�ӿ���ϵ�y(t��ng)��ϵ�y(t��ng)�����]�h(hu��n)�ش���������CPLD����Ӳ���Y(ji��)��(g��u)���������ϵ�y(t��ng)�Ŀ��ƾ��ȡ�Ʒ�|(zh��)�Լ�ϵ�y(t��ng)�ķ�(w��n)���ԺͿɰ��ԡ�ͬ�r�����M(j��n)늙C(j��)��׃�ٿ���Ҳ����һ���ķ��ۡ�
�P(gu��n)�I�~����(sh��)����̖̎���������M(j��n)늄әC(j��)���\�ӿ��ƣ��ŷ�ϵ�y(t��ng)
1 �� ��
���M(j��n)늙C(j��)����һ�N��(sh��)���ŷ���(zh��)��Ԫ�������нY(ji��)��(g��u)���Ρ��\�пɿ������Ʒ��㡢�������ܺõȃ�(y��u)�c������ڔ�(sh��)�ؙC(j��)�����C(j��)���ˡ��Ԅӻ��x�����I(l��ng)�������V���đ�(y��ng)�á��S�������Ӽ��g(sh��)���M(j��n)�����e���C(j��)���g(sh��)��(y��ng)�á����Ϳ��Ʋ��Եij��F(xi��n)���˂������ؙC(j��)е�\�ӌ��F(xi��n)���_��λ�ÿ��ơ��ٶȿ��ơ����ٶȿ��ƣ��Լ��@Щ���ؙC(j��)е���ľC�Ͽ��Ƶ�Ҫ��Խ��Խ�ߡ�Ŀǰ���F(xi��n)���M(j��n)늙C(j��)���(q��)�ӿ��Ʋ��ñ��^���һ�N��������8031��8098��̎�����������ϵ�y(t��ng)��CPU��ͨ�^һЩ�С���Ҏ(gu��)ģ�����·����8253��8254�ȁ��������}�_ݔ���l�ʺ��}�_ݔ����(sh��)���Ķ����F(xi��n)���M(j��n)늙C(j��)���ٶȺ�λ�ö�λ�������@�N�����У�̎�����������߅�����^�࣬�@������Ӱ푵�����ϵ�y(t��ng)�ķ�(w��n)���ԡ��ɿ��ԣ�������ijЩ�����ϣ�ϵ�y(t��ng)�ij���̎���ٶ�Ҳ�ɞ��Ƽs���ϵ�y(t��ng)���r�����Ե�һ��ƿ�i��
�������߲���DSP(Digital Signal Processor)����ϵ�y(t��ng)����̎���������Y(ji��)��CPLD(Complex PrograrnmabIe Logic Device)���O(sh��)Ӌ�˲��M(j��n)늙C(j��)�Ĕ�(sh��)���\�ӿ���ϵ�y(t��ng)������ϵ�y(t��ng)�x�������٣��ڌ��r�Ժ��`���Ե������϶��кܴ����ߣ��O���ڲ��M(j��n)늙C(j��)�ļӜp�ٿ��ơ�
2 DSP�ڲ��M(j��n)늙C(j��)���\�ӿ���ϵ�y(t��ng)�еđ�(y��ng)��
2��1 DSP����
DSPоƬ��Ҳ�Q��(sh��)����̖̎��������һ�N�e�m�����M(j��n)�Д�(sh��)����̖̎���\���̎������DSP��оƬһ������������ܛ�������Y(ji��)��(g��u)�����(n��i)���Ļ����Y(ji��)��(g��u)���������Y(ji��)��(g��u)����ˮ��ָ��Y(ji��)��(g��u)�Լ�һЩ���õ�Ӳ���˷����ȡ�DSP�����·�ă�(y��u)���O(sh��)Ӌ�Լ�һЩ����ָ��ʹ�ô�DSP������һ��ָ�����ڃ�(n��i)��ɣ�ͨ��DSPоƬ������һЩ��Ҫ���c��
(1)����͔�(sh��)��(j��)���g���_�����Դ��r�L��ָ��͔�(sh��)��(j��)��
(2)Ƭ��(n��i)���п���RAM��ͨ����ͨ�^�����Ĕ�(sh��)��(j��)�����ڃɉK��ͬ�r�L����
(3)���ٵ��Д�̎����Ӳ��I��O֧�֡�
(4)�����چ����ڃ�(n��i)�����Ķ���Ӳ����ַ�a(ch��n)������
(5)֧����ˮ��������ʹȡָ���g�a�͈�(zh��)�еȲ��������دB��(zh��)�С�
DSPоƬ����ܛ���ɾ�������������ͨ��̎���������`������c������ͬ���I(y��)�Ԅӻ������г��õ�8λ��16λ��Ƭ�C(j��)��ȣ�DSPоƬ���и����m���ڔ�(sh��)����̖̎����ܛ����Ӳ���YԴ�������ڏ�(f��)�s�Ĕ�(sh��)����̖̎���㷨��
2��2���M(j��n)늙C(j��)�\�ӿ��Ƶđ�(y��ng)�ü����y�c
Ŀǰ���ƵĻ���DSP�IJ��M(j��n)늙C(j��)���\�ӿ���ϵ�y(t��ng)��������׃�E�A����ȹ���r��܇���ӹ�ϵ�y(t��ng)���ڴ�܇���ӹ�ϵ�y(t��ng)�У����ߵ��M(j��n)�o��ͨ�^���M(j��n)늙C(j��)���ӿ�ģ���(q��)�ӣ��錍�F(xi��n)܇���ӹ�����ȹ���ęE�A���沢���C�����N���S�������E�A���S�����ڼӹ��^���е��ߵ��M(j��n)�o�l�ʱ�횱��C�鹤���Ļ��D(zhu��n)�l�ʵ�2����ͬ�r���և�(y��n)�����λ����(y��ng)�P(gu��n)ϵ����ˣ�ԓ܇���ӹ�ϵ�y(t��ng)��һ���P(gu��n)�I���}���ǿ����(q��)�ӵ��ߵIJ��M(j��n)늙C(j��)�c���Sͬ���\�С�ԓ܇���ӹ�ϵ�y(t��ng)��ϵ�y(t��ng)���ƿ�DҊ�D1��
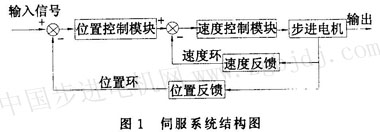 ��������ϵ�y(t��ng)�����S��λ����̖����ݔ�������̖��ͨ�^���b�����S�����M(j��n)늙C(j��)�Ĺ���}�_�l(f��)�����y������(y��ng)��λ�á��ٶ�ֵ���քeͨ�^λ�íh(hu��n)���ٶȭh(hu��n)���������Ɔ�Ԫ���ɿ��Ɔ�Ԫ����(j��)������̖�l(f��)���}�_�����(q��)�Ӳ��M(j��n)늙C(j��)��ʹ֮�����O(sh��)���ı����P(gu��n)ϵͬ�c�C(j��)�����Sͬ���\�У���������һ����������(n��i)�M(j��n)�б������{(di��o)��ԓ����ϵ�y(t��ng)���÷���(y��ng)ʽ���M(j��n)늄әC(j��)��������6�ķ�ʽ�\�У��䲽��Ǟ�0��75 o��ͬ�r����1 000�}�_��Ȧ������ʽ����}�_�l(f��)�����z�y���S�Ͳ��M(j��n)늙C(j��)����λλ�ã���(d��ng)���S�D(zhu��n)��n=1 500r��min�������S�Ͳ��M(j��n)늙C(j��)ÿ�D(zhu��n)�IJɘ��cm=1 000���tҪ��IJɘ�����T=60/mn=40��s����˞鱣�C���M(j��n)늙C(j��)�܉�ͬ����ۙ���S���\�У�������ϵ�y(t��ng)�Č��r̎���ٶ����^�ߵ�Ҫ�����⣬���ڲ��M(j��n)늙C(j��)�ľ��l�����^ܛ��늴��D(zhu��n)�ض��Sݔ������}�_�l�ʵ����Ӷ��pС�����ٶ��^����ٶ��^��r�����M(j��n)늙C(j��)���}�_�D(zhu��n)�Q�r����������ʧ�����Ķ�ʹ�ò��M(j��n)늙C(j��)�ĄӑB(t��i)����׃�Ӱ푵�늙C(j��)�ĸ�ۙ���ȡ�������߲��M(j��n)�(q��)��ϵ�y(t��ng)�ľ��ȺͿɿ��ԣ���늙C(j��)�\���^���У��ͱ���M(j��n)���m��(d��ng)?sh��)��\�ӿ��Ʒ� |



