�в����c�ͺ��ͳ���늙C�ı��^
�w����������S�����У
(�㽭��W늙C���̌Wϵ���㽭���� 310027)
ժ Ҫ����B���в��ͺ͏ͺ��ͳ������D늙C�ĽY�����\��ԭ��������a�����D�\�ӵ��������l�������˸��������õ�ģ�B���ӽ��|�����r���OӋ˼·�Ϳ��Ʒ����ϵĮ�ͬ��
�P�I�~���в��ͳ���늣��C���v���ͳ���늣��C���ͺ��ͳ���늣��C
l �� ��
�͙Cе�ǽ�����lչ������һ�����µ��о��I���������粚Ŀ���ش��о����F�ѽ��ܵ������ϸ��l�_���ҵ��ձ���ҕ�������о������Ҍ������͙Cе�ĺ��ġ���늙CҲ�����Խ��Խ�ߵ�Ҫ����늙C������늙C��һ�N�����нY�����Ρ�푑��ٶȿ졢����Ա��֡��ܫ@�õ��ٴ��D�ء�������ֱ���ӵ����c���ں��պ��졢�͙Cе���C���ˡ��Ԅӿ��Ƶ��I�������V���đ���ǰ����
�����D늙C�����É���մɲ��ϵ��扺�Ч���������ֱ���D�Q�ɳ��l��ȵ���ӣ�ͨ�^Ħ�����c����|���D���\�ӡ������ԭ�������É���մɲ��ϼ��l�����ӱ����|�c�ęE�A�\��܉�E�������伤�l�E�A�\�ӵķ�ʽ��ͬ���ɷ֞��в��ͺ��v���̓ɷN��
Ŀǰ��Ҋ���D����늙C�����¶����в��͵ģ��������f�в��ͳ���������о���څ���ƣ����ձ��ь��F���������a���������늙C������ָ�ˁ������ͺ��ͳ�����������Ѓ��ݡ�
2�в��ͺ͏ͺ��ͳ���늙C�ĽY��
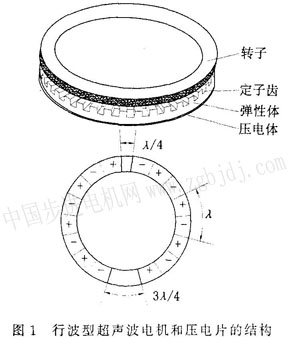
�в��ͳ���늙C�ij�Ҋ�Y����D1��ʾ���ɉ���մ�Ƭ�����X�Ķ��ӏ����w��Ħ�����ϡ��D�ڵȽM�ɣ��D����һ���ĉ����c���ӽ��|�����ӏ����w�ϵ��X������Ŵ����á���+����-�����퉺�Ƭ�ĘO�������෴���ɽM���Ƭ�Ն����ˣ�4���ﮔ�ڦ�/2���քeͨ��ͬ�l���ȷ�����λ����/2�ij��l��Ľ�����̖��
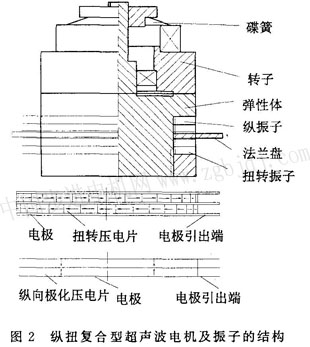
�ͺ��ͳ���늙C�ĽY����ʽ�^�࣬�еIJ���ģ�B׃�Q���ӣ���б����ʽ�����_����ʽ���еIJ��ÿvŤ���ӏͺϣ�����ᘌ������D����һ�µĿvŤ�ͺ��ͳ���늙C�o���B���䳣Ҋ�Y����D2��ʾ���vŤ�ͺ��ͳ���늙C��Ҫm�A��ʽ���ں��D�ӽM�ɣ��v��Ť������ӊA�ڏ����w֮�g���ɶ��ӣ��D��ͨ�^һ������һ���ĉ����c���ӽ��|���D���c���ӽ��|�Ķ�����Ϳ����һ��Ħ�����ϣ�������Ħ��ϵ�����pС���D�ӆ���ĥ�p���v�����Ƀ�Ƭ��ȷ���O�����մɭh�M�ɣ�Ť�D�����ɶ�Ƭ����O��������Ƭ�M�ɣ��D�м��^��ʾ����鉺��մɵĘO�����vŤ���ӷքeͨ��ͬ�l����һ����λ��Ľ�����̖��
3�в��ͺ͏ͺ��ͳ���늙C���\��ԭ��
�в��ͺ͏ͺ��ͳ���늙C�������É���մɵ��扺�Ч�������l�����ӏ����w�����|�c�ęE�A��ӣ�ͨ�^Ħ��������һ�������c����|���D�������D�\�ӣ��������l���ӱ����|�c�E�A�\�ӵķ�ʽ��ͬ��
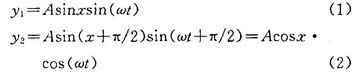
�в��ͳ���늙C�����Õr�g��λ��У�2�ăɽM������̖�քe�����ڿՆ���λ���У�2�ăɽM���Ƭ�ϣ��ɽM��̖�l�ʡ���ֵ��ͬ���քe�ڶ����м��l���ɽM���g�͕r������λ���У�2���v��
���v���ϳ�һ�в���
y=yl+y2=Asin(x+��t) (3)
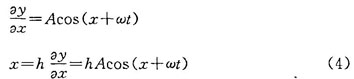
�ɽdz߂���ԭ���ɵ��X������λ�ƞ飺
ʽ�� h�����X픵����ԭh������ľ��x�����X픲��|�c���\��܉�E��һ�E�A��
�vһŤ�ͺ��ͳ���늙C�Ƀɂ����ӣ�һ���v���Ӻ�һ��Ť�D���Ӽ���v���Ӯa���S����ӣ��ɿ��ƶ��Ӻ��D�ӆ���Ħ�������DŤ���Ӯa��Ť�D��ӣ��������D��ݔ�����ء����Ѓ����ӵ���늉��l����ͬ�����O�ڿv��Ť���Ӽ����£����ӱ����|�c���S�������քe�����C��ӣ�����λ���У�2����λ�Ʒքe�飺
�t���ӱ����|�c�ĺϳ��\�ӷ��̞飺
|