һ�N��(sh��)�õIJ��M(j��n)늄�(d��ng)�C(j��)��׃��(x��)���(q��)��(d��ng)�������O(sh��)Ӌ(j��)
����꣬�����֣����N���������I(y��)��W(xu��)���������710072��
ժҪ�������˲��M(j��n)늄�(d��ng)�C(j��)���}���{(di��o)��ʽ��(x��)���(q��)��ԭ����ᘌ�(du��)������ʽ���M(j��n)늄�(d��ng)�C(j��)���O(sh��)Ӌ(j��)��һ�N����AT89C51��Ƭ�C(j��)��PWM���D(zhu��n)�ؿ�׃��(x��)���(q��)��(d��ng)����������Ԕ��(x��)�U����ܛ��Ӳ�����ֵַČ�(sh��)�F(xi��n)��������(sh��)�(y��n)�Y(ji��)��������ԓϵ�y(t��ng)��(x��)�־��ȸߡ��\(y��n)��ƽ��(w��n)����С���ԃr(ji��)�ȸ��ҷdz���(sh��)�á�
�P(gu��n)�I�~��?ji��n)�Ƭ�C(j��)�����ʽ���M(j��n)늄�(d��ng)�C(j��)����(x��)���(q��)��(d��ng)��PWM
�ЈD���̖(h��o)��TM383.6 �īI(xi��n)��(bi��o)�R(sh��)�a��A ���¾�̖(h��o)��1004 -7018( 2008) 09 -0031 -04
O����
���ʽ���M(j��n)늄�(d��ng)�C(j��)������(y��ng)ʽ������ʽ���M(j��n)늄�(d��ng)�C(j��)�ă�(y��u)�c(di��n)��һ������(y��ng)�÷dz��ձ顣�����ܺ�(ji��n)�ε�ֱ�ӽӵ���ͨ�Ľ�ֱ���Դ���\(y��n)�D(zhu��n)������Ҫ���T���(q��)��(d��ng)������늙C(j��)���w�x������r�£��������ĺÉĺܴ�̶���Ӱ�������(g��)ϵ�y(t��ng)���\(y��n)�����ܡ��������O(sh��)Ӌ(j��)�Ŀ������ԃ�����ʽ���M(j��n)늄�(d��ng)�C(j��)�\(y��n)�����Ԟ���l(f��)�c(di��n)����AT89C51��Ƭ�C(j��)��DAC0832����ģ������nλ��(x��)�ֺͺ����ȹ��ܡ����c���ʽ���M(j��n)늄�(d��ng)�C(j��)�����Դ��ظ��Ʋ��M(j��n)늄�(d��ng)�C(j��)���\(y��n)�����ܣ��،��䑪(y��ng)���I(l��ng)��(j��ng)��(j��)��(sh��)�ã�ͨ���ԏ�(qi��ng)��
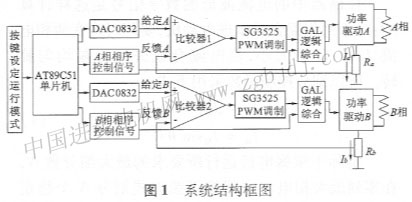
1ϵ�y(t��ng)�Y(ji��)��(g��u)����
ϵ�y(t��ng)�Ɇ�Ƭ�C(j��)�����·����(x��)���·���ز������·���z��(d��ng)�c�����·��߉�C���·�����o(h��)�·�M�ɡ��(q��)��(d��ng)���Ŀ��ƺ��IJ���AT89 C51��AT89C51ͨ�^(gu��)��(du��)ݔ����̖(h��o)�Д���^��ݔ���惦(ch��)���нo��������εĿ�����̖(h��o)����̖(h��o)��(j��ng)�^(gu��)DAC0832�ͷŴ����D(zhu��n)�Q������(y��ng)��ģ�M늉���̖(h��o)��ԓ��̖(h��o)��늙C(j��)�@�M�е������(j��ng)�^(gu��)�ɘ�����D(zhu��n)�Q�ɵ�늉���̖(h��o)�M(j��n)�б��^����������̖(h��o)���ڽo��늉����·�����Źܽ�ֹ����֮ʹ���Ź܌�(d��o)ͨ��(l��i)�(q��)��(d��ng)���M(j��n)늄�(d��ng)�C(j��)��D/Aݔ����ͬ�Ŀ���늉����@�M�����^(gu��)��ͬ�����ֵ���Y(ji��)��(g��u)��D��Dl��ʾ��
2�}���{(di��o)��ʽ��(x��)�ֿ���˼�����
������ʽ���M(j��n)늄�(d��ng)�C(j��)�ڵ����\(y��n)�D(zhu��n)�r(sh��)�������(d��ng)������(w��n)�}���@��(g��)ȱ�c(di��n)���������đ�(y��ng)���I(l��ng)����늙C(j��)���w�ȶ�����r�£��҂�����ͨ�^(gu��)�������M(j��n)�Ŀ��Ƽ��g(sh��)��(l��i)�˷�늙C(j��)�\(y��n)���^(gu��)���е��@��(g��)��(w��n)�}����(sh��)�(y��n)���������Ôز������(q��)��(d��ng)���g(sh��)�����Ի����������l����F(xi��n)���ü�(x��)���(q��)��(d��ng)���g(sh��)Ҳ�ɜpС���(d��ng)����������߀�������늙C(j��)���\(y��n)�D(zhu��n)���ȡ�
��ͨ���IJ��M(j��n)늙C(j��)�(q��)��(d��ng)�·�У�늙C(j��)���@�M��ͨ�˵��Ƿ�����̖(h��o)���������׃�ġ�����(y��ng)�ؾ�ʹ��늙C(j��)���\(y��n)�Еr(sh��)�������@�IJ��M(j��n)�У�������^����(x��)�ֿ��ƾ���ʹ�@�M��ͨ�˵�����A�ݠ��������½����@����ÿ���}�_�ГQ�r(sh��)���@�M���������ͻ׃�ġ��~������ֳɶ��ٴ��ГQ���D(zhu��n)�Ӿ��Զ��ٲ���(l��i)���һ��(g��)ԭ�еIJ���ǡ�
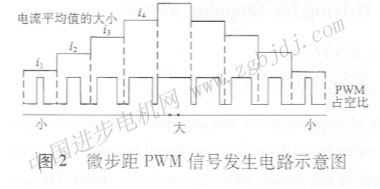
��ϵ�y(t��ng)���õ����}���{(di��o)��ʽ��(x��)�ֿ��ƣ��ڈD1�Ќ�(sh��)�H��CAL�h(hu��n)�η�����ݔ�����������̖(h��o)�������A�ݲ��������}���{(di��o)����̖(h��o)( PWMl��PWM��̖(h��o)ռ�ձ�Խ��ƽ�����Խ��ͬռ�ձ�PWM��̖(h��o)�ஔ(d��ng)������(y��ng)��ֵ���A�ݲ���PWM��̖(h��o)���ƹ��Źܹ������_�P(gu��n)��B(t��i)���{(di��o)��(ji��)���ŹܵČ�(d��o)ͨ�r(sh��)�g������늙C(j��)���@�M��ƽ������Ĵ�С������PWM��̖(h��o)�l(f��)���·��ʾ��D��D2��ʾ��
3Ӳ���·�O(sh��)Ӌ(j��)
3 1��Ƭ�C(j��)���؆�Ԫ��D/A�D(zhu��n)�Q�·
��Ƭ�C(j��)AT89C51����ϵ�y(t��ng)�����؆�Ԫ����������簴�I�o���Ŀ�����̖(h��o)��������(x��)�֙nλ���\(y��n)���}�_�l�ʡ������D(zhu��n)����/ͣ����̖(h��o)��Ȼ��ݔ���惦(ch��)��������(y��ng)�ļ�(x��)�����������̖(h��o)���ٽ�(j��ng)�^(gu��)D/A�D(zhu��n)�Q��ģ�M��̖(h��o)��
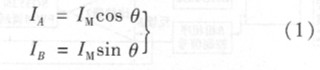
�惦(ch��)���е�������εĔ�(sh��)����̖(h��o)���@��Ӌ(j��)��ģ���(du��)�ڃ�����ʽ���M(j��n)늄�(d��ng)�C(j��)��Ҫͬ�r(sh��)��׃�������/IA��/IB�Ĵ�С��ʹ����ϳ�ʸ���ȷ��������D(zhu��n)�����Լ�(x��)�ֿ��ƺ���(sh��)������ʽ��
��(sh��)�H�и���(j��)늙C(j��)�\(y��n)����Ҫ���****��(x��)��?j��n)?sh��)N�����㵽****�����֮�g�����ҷ�ʽ����N��(g��)��(w��n)�������g�����B(t��i)������(du��)��(y��ng)ÿ��(g��)��B(t��i)�Ķ��M(j��n)������ֵ����E2PROM�С����Ҡ�B(t��i)������ֵ����Ҫ���ٿ��g�惦(ch��)����������ֵֻ����λ����90�ȣ�ͨ�^(gu��)ܛ�����Ɍ�(sh��)�F(xi��n)����Ƭ�C(j��)���؆�Ԫ��D/A�D(zhu��n)�Q�·�D��D3��ʾ��
|