һ�N���ڴ��Ҏ��������ͬ��늄әC���Ʒ���
�����⣬갿�ï���w��ۣ��b�ױ����̌WԺ������100072��
ժҪ�������һ�N���ڴ��Ҏ����늄�̹��������ͬ��늄әCʸ�����Ʒ����������Ƭj��׃��������****�D�ؿ����㷨�ԝM��늄�̹�˵Ą���Ҫ�����û��ڴ�朵�Ч�ʃ����㷨���ϵ�yЧ�ʣ���������C��ԓ�����Č����Ժ���Ч�ԡ�
�P�I�~������ͬ��늄әC�����Ҏ����Ч�ʃ���������
�ЈD���̖��TM341 �īI���R�a��A ���¾�̖��1004 -7018( 2008) 09 -0038 -04
0�� ��
늄�̹����늙C��Ҫ�ڵ��ٻ����rݔ�����D�أ������ں܌����ٶȷ�����ƽ�����{���ٶȺ��D�أ����Ҫ������^������������������ʽ����( IPM)ͬ��늙C��Ч��϶�^С��늘з�����Ӱ푺ܴ���ζ����������������и�����Ӱ푣�ʹ��늙C�����ڻ���֮���\�У��m����늄�܇�v���È��ϡ�
���y��IPM늙C�ٶȿ��ƣ�ͨ���ڻ������ϲ���ֱ�S���ؓ�����a�������M�����š����]�Ќ��F��늙C�Ķ��Ӵ�朿��ƣ�ϵ�y�ӑB���ܺ����wЧ�ʲ����_��****�������Ӵ�朶����ʸ�����Ʒ����mȻ����˄ӑB���ܣ�������ú��D�ؿ��ƺ����ſ��ƃɷNģʽ�ӑB�ГQ�Ŀ��ƽY��������ģʽ��ƽ���^�ɳɞ��yֱ��ͬ�rϵ�y���wЧ����δ�õ������������о���
�����ڷ�������ͬ��늄әC���ſ���ԭ���Ļ��A�ϣ��Ĵ�朿��ƵĽǶ����֣������һ�N���ڴ��Ҏ����늄�̹������늙C���Ʒ������ӑB�r���ú��D�^�����Ņ^�Ěwһ�����Ʒ����������˺��D�ؿ��ƺ����ſ���֮�g���ГQ���}���M�뷀�B����û��ڴ�朵�Ч�ʃ����㷨�����ϵ�y���wЧ�ʣ�������Matlab/Simulink�M���˷�����C��
1����ͬ��늄әC�������ʸ������
1.1����ͬ��늙Cʸ������ԭ��
��d��q���D����ϵ�£�IPM�ĄӑB늉����̞飺
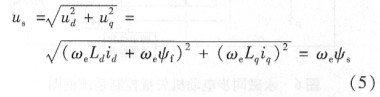
ʽ�У�us��is�ͦ�s���քe�鶨��늉�������ʹ�朣�d��q�քe��ʾ���ӵ�d��q�S������Ld��Lq�քe�鶨���@�M��d��q�S늸Ц�e�����D��늽��ٶȣ���f���D�����Ŵ�朣�p��늙C�O������p=d/dt�����ӡ�
ʸ�����ƌ��H���nj�늄әC�������ʸ����λ�ͷ�ֵ�Ŀ��ơ���ʽ(3)�п��Կ�����늄әC���D��ȡ�Q�ڶ�������Ŀ���ʸ��is����is�Ĵ�С����λȡ�Q��id��iqͨ�^�@�ɂ�����Ī������ƣ����F늄әC���D�غ��D�ٵĿ��ơ�
1.2���ʸ�������㷨
����****�D�أ����ԭ������IPM늙C����ʹ늚�p�Ľ�����С��ϵ�y����׃���~�����ʵ�Ҫ��****������׃����Ч���_��****��
��id=iscos�ȣ���iq=��issin�ȣ��՞鶨�����ʸ���cd�S�A�ǡ�����ʽ����ʽ(3)��������ƫ��������������㡣����
���ֱ�����S����M����ʽ��
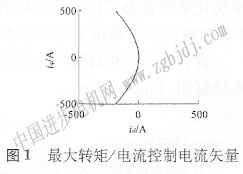
���ʸ���\��܉�E��D1��ʾ���@�N�����㷨�ں��D�^����Ч��������׃����PWM�������ڌ��F�o����������ơ�
늙C���ٷ��B�\�Еr�����Զ�����艺������ʽ(1)��ʽ(2)���У�
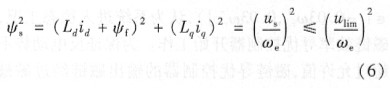
�ڌ��H����ϵ�y�У�늙C��늉��ĘO��ֵulim��������O��ֵilim��Ҫ�ܵ���׃��ֱ����늉�����׃��****ݔ����������ơ��S��늙C�D�ٵ����ӣ�늙C��늉����ɱ��������ӣ���KPWM�������_��͠�B������늉��_����ֵ�����Ҫ���^�m���٣���Ҫ����늘з����������Ӵ��ɰ����늙C�M�����Ņ^���M�㣺
ʽ�У�ulim��늉��O��ֵ��
��Ҋ����������o���D�٦�e����朦�s�� |