����Magnet��Simulink�Ϸ����늴őҸ�ϵ�y���Ʒ���
�w���������������x���Ϻ���ͨ��W���Ϻ�200240��
ժҪ��ᘌ�һ�N���ĘO늴��F�����������ɶ�늴őҸ�ϵ�y�������һ�N����Simulink��Magnetܛ���Ϸ���ķ�����ԓ�������Ԍ��F늴őҸ�ϵ�y���Ʋ��Ԝʴ_�ķ��������ڴ˻��A�ό�늴őҸ�ϵ�y�Ŀ�������˸��M�˵��㹦�ʺͰ��㹦�ʿ����㷨�����������ϵ�y�ĄӑB���ܡ�
�P�I�~��늴őҸ�ϵ�y���Ϸ��棻Magnet���㹦�ʿ���
�ЈD���̖��TM35 �īI���R�a��A ���¾�̖��1004 -7018 (2008) 09 -0042 -04
O����
�őҸ����g������늴���������������w�Ҹ��ڿ��У����F���w�֮�g�oֱ�ӽ��|���������������\�����_���oĦ�����őҸ����g�nj�늹���Ӽ��g���Ԅӿ��Ƽ��g�����������g���z�y���g��Ӌ��C���g�ȸ��¼��g�ЙC�Y����һ��ĵ��͙C�һ�w�����g���������Ż�늴��������w�o���|�ؑҸ��������o�Կ����ֶΣ��ԝM�㹤�I���a��߾��ܡ����ٶȷ���lչ����Ҫ���īI[1]�����һ�N���͵�늴őҸ�ϵ�y������һ���Ɏ��������w���ĘO��ܗ늴��F������С�͑Ҹ�ϵ�y���īI[3]ᘌ�ԓ�őҸ�ϵ�y����˻��ں������͵����Qֱ�������ɶ��ϵĺ��϶�Ŀ����㷨��
Ŀǰ�����N늴őҸ�ϵ�y���OӋ�Ϳ����д��ڿ��Ʋ����y�Ԝʴ_��C�����Ć��}�����Ľ�Bһ�N�µķ��淽����������Magnet��Simulink���Ϸ��淽�����������ģ�Ͳ����������M���㹦�ʺͰ��㹦�ʿ��Ƶķ��档�Ϸ�����ָ�Ãɂ����߸���Č��Iܛ��������sϵ�y��˲�B���}��ÿ������������������}�I����������̣���ݔ��Ĕ������������������ṩ�ġ����еķ�����ͬ�r�\�����˲�B���}��������֮�g�����Ľ��Q�������l�����ԝM�����ľ��ȡ�
��������Magnet�����Ҹ�ϵ�y��ģ�ͣ�������ģ��Ƕ��Simulink���棬������Ƶķ������cSim-ulink�������\�㡣ͨ�^Simulink�Ŀ��Ʒ������oMagnetģ���ṩ����늉������ìF��������Փ��������㹦�ʿ��Ʋ����Լ����㹦�ʿ��ƣ������^���棬�ó��˽ӽ��ڌ��Hģ�͵ĽY����
1ϵ�yģ�͵Ľ���
1.1 Maanetܛ������
Magnet���Ј���****����2D/3D�����ɶ�˲�B늴ň�����������ܛ���������õ�ANSYSܛ�����f��Magnet�ă��c���ڣ����挦����ӌ�һ�������ڵ��l늴ň��ķ���Ӌ���ϣ�����������Win-dows���棬���Է�����ٵؽ���ģ�ͺ��M�з��������ṩ�cSimulink�B�ӵIJ�������Ϸ���Č��F�ṩ�˻��A��
1 2늴őҸ�ϵ�y�Y����Magnetģ��
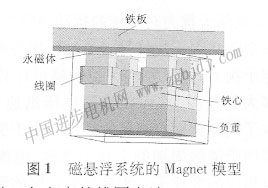
�����Y���й�ܗ���Ă��O��ÿ���O�������w�Ϳ�������ľ�Ȧ�M��[3-4]�������īI[4]���Hģ�͵ijߴ�Ͳ��ϣ���Magnet��ģ����D1��ʾ��****��ͬ�����Ϸ����]�в����F܉��ֱ��늙C�����Dz����˴�ƽ�壬������ģ���OӋ��
1.3���������ɶȵľ�Ȧ���
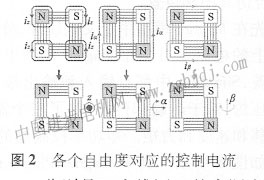
ԓ늴ŽY�����Կ����������ɶȣ��Qֱ����Ě�϶z�@���S�D�ӵ��ՃAб�ǶȦ��Լ��@���S�D�ӵĦսǶȡ����У������@�M���iz��i����i�·քe�����Qֱ����z�Aб�ǶȦȺͦգ���D2��ʾ��
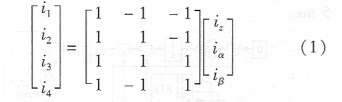
i1��i2��i3��L4�քe���Ă���Ȧ�ϵČ��H�������������Ч���iz��i����i�����Pϵ���Ԍ�����ʽ��
�����������ɶȵ��������̾���ͬ�ӵ���ʽ[4]�����Ԍ���ҪӑՓ�Qֱ�������ɶȵĿ��ơ�
2�㹦�ʿ����c���㹦�ʿ���
2.1�㹦�ʿ��������c
�㹦�ʿ����������������r늴ž�Ȧ��������ƞ��㡣�����Fؓ�d�����S�ķ�����׃���r��ͨ�^�m���{���Ҹ���϶��ʹ�ÑҸ��w�����Ůa���������c�Ҹ��w��������ȣ��Ķ����F�Ҹ��w�����Ҹ����˕r�����־�Ȧ��������㸽��С�����ӡ�
�īI[3]�ѽ�����˺��϶�Ŀ��Ʋ��ԣ�����������ˑҸ�ϵ�y�Ġ�B |