һ�N�����Ϳɾ������S�\�ӿ�����
�� ������ �������v��
(�����I���I��W�������� �����I 150001)
ժ Ҫ������Ī������\�ӿ���������ͨ�^�ֳ־������������ó���Ҳ����Ӌ�����Ͼ������ó���ͨ�^RS-232�������������ȣ�Ȼ�����\�С�����ӑՓ��Ӳ���·��ܛ�������OӋ���o��һ���Ì�����
���I�~���\�ӿ��ƣ�̎�����������OӋ
1 �� ��
�����Ϳɾ����\�ӿ�����(PMC)��һ�N���͵ęCе�\�ӿ����b�ã��c�ɾ���߉������(PLC)��֮ͬ̎�������\�ӿ��ƞ�����߉���ƞ��o���c���ڿ������\�ӿ�������֮ͬ̎��������ه��Ӌ��C���ɪ���������һ�������Ŀɾ����\�ӿ�����һ��Ҫ�������ׂ����֡�
1��1 �\�ӿ���
�߾��ȵ��ŷ�늙C�����M늙C���\�ӿ��ƣ�һ������]�h��ʽ��
1��2ģ�M�͔���I��O
������Cе��צ���и�ߡ������ȹ��ߵĿ��ƺ���λ�_�P����λ��̖�����Ϡ�B��ݔ����̖�ęz�y��
1��3�����T�ӿ�
���ڽ������I������ϵ�y�������@ʾ�\�Р�B�ȡ����Ƶ�HIT4000���S�\�ӿ������߂��������ܣ���������һЩ���c��
(1)�Ɍ��F���S�ŷ�늙C���]�h���ơ�
(2)�Ȳ�PLC������36�cI��O������
(3)ͨ��RS232�ӿڣ�������ֳ�ʽ��������Ӌ��Cϵ�y�������õ����I����ݔ�͵��������ķ���ʧ��RAM�У��������ɪ����\�С�
(4)����������4λ���ֵĠ�B�@ʾ�������@ʾ�\�Р�B��
(5)�����BASlC��36�l����ָ��������ա�
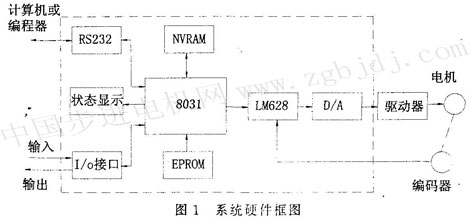
2 Ӳ���Y��
�D1̓��Ȟ�ϵ�yӲ�����ܿ�D��
��ϵ�y�x����MCS-51ϵ���е�8031���������������Ŀ��ƺ��ģ�����Uչ��һƬ27256EPROM��һƬ6264RAM��EPROM��Ҫ�Á����ϵ�y�ıO�س���SRAM��Ҫ�Á��惦����λ�C���͵����I�����Ҿ��е�늱��o�Ĺ��ܡ�ʹ���I�������ڵ�늶��Gʧ��
���Ì��þ����\�ӿ���оƬLM628������ŷ����ƣ�ԓоƬ��Ҫ���ܞ飺���пɾ��̔���PID�����㷨��32λ��λ�á��ٶȺͼ��ٶ�Ӌ�������Ȳ������ٶ�܉�E�����l���������r�ДࡣHIT4000���S�\�ӿ���������8031��LM628�M�о��̣�����
12λD��Aݔ�����ṩ��10V��ݔ��늉���
HIT4000������߀�ṩ��20·�ɹ�늸��x����_�P��ݔ���16·�ɹ�늸��x����_�P��ݔ�������ڌ��Hϵ�y�����P��I��O�c���ƺ͙z�y���������ϵ�y�Č��r����������ϵ�y�Uչ��8·�ⲿ�Д�(������3·�ŷ��Д�)��ͬ�r���ˌ��r�@ʾϵ�y�\�Р�B��ϵ�y������4λ���ֵĠ�B�@ʾ����
3 ܛ���Y��
�����������OӋ�Ŀ���ܛ����������
(1)���Ñ����I�����Ŀ�˳���ľ��gܛ����
(2)��Ŀ�˳�����͵���������ͨ��ܛ����
(3)ʹ���������F�β����B�m�\�е��{ԇܛ����
(4)�̻��ڿ������еıO�س���
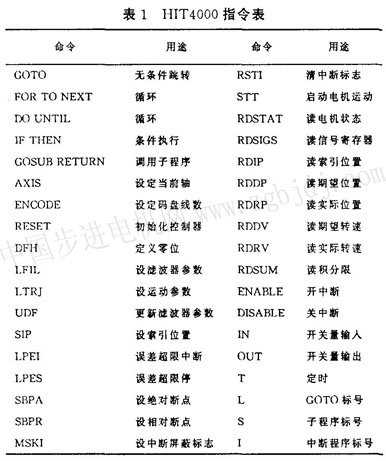
�Ñ����I����Ҫ���տ������ṩ��ָ���������Ҫ������1��HIT4000�������ṩ��ָ�
���˱�1���е������⣬�����Z��߀�ṩ���S�����\�������Ҫ�֞���������g�\������Pϵ�\�����߉�\��������g�\�������+��һ������������(ȡģ)����(�˷�)���Pϵ�\���������>��<��=����߉�\���������&(λ߉�c)��|(λ߉��)����(λ߉��)��
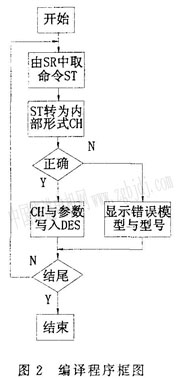
���gܛ����Ҫ���g�����I�����ļ����������κ��ı����h���¾����ı��ļ������gܛ������Ҫ��������ⲿ��ʽ(��ӛ��)�D����Ȳ���ʽ(��һ�ַ�������)���⣬߀�����I�����M���Z���z�飬�܉�ָ���e�`����c�e�`���ڵ���̖���D2�龎�gܛ���ij����D��
ͨӍܛ���c��ԇܛ������ϵ�y�C����ͨ�^����ͨ���c���������f�����������ܛ����ֻ���^ͨ��ܛ��ؓ؟��Ɍ��������ɵ�Ŀ���ļ����ͽo |