������(j��ng)�W(w��ng)�j(lu��)���Ƶă�늄�(d��ng)�C(j��)ͬ��ϵ�y(t��ng)�о�
���\(y��n)��1,2��ꐘs1���w����2
(1�}�ǹ��W(xu��)Ժ�����K�}��224051��2���K��W(xu��)�����K�(zh��n)��212013)
ժҪ���Զ�׃�����Ǿ��ԡ���(qi��ng)��ϵă�늄�(d��ng)�C(j��)ͬ������ϵ�y(t��ng)���о���(du��)��(du��)׃�l����늵ĸБ�(y��ng)늙C(j��)ϵ�y(t��ng)�M(j��n)�����c(di��n)�о���������늙C(j��)ͬ��ϵ�y(t��ng)�Ĕ�(sh��)�W(xu��)ģ�͡�����rbf��(j��ng)�W(w��ng)�j(lu��)���m��(y��ng)pid���������Y(ji��)�����m��(y��ng)��(j��ng)Ԫ�����a(b��)��?sh��)Ľ�����Ƽ��g(sh��)���O(sh��)Ӌ(j��)�˃�늙C(j��)ͬ���{(di��o)��ϵ�y(t��ng)����(j��ng)�W(w��ng)�j(lu��)��������ԇ�(y��n)�Y(ji��)������ԓ�������Ԍ�(sh��)�F(xi��n)늙C(j��)�D(zhu��n)�ٺ�Ƥ�������Ľ�����ơ�
�P(gu��n)�I�~��ͬ��ϵ�y(t��ng)����(j��ng)�W(w��ng)�j(lu��)��������ƣ�늄�(d��ng)�C(j��)��������
�ЈD���̖(h��o)��tm346 �īI(xi��n)��(bi��o)�R(sh��)�a��a ���¾�̖(h��o)��1004��7018(2009)11��0053��04
o�� ��
��늙C(j��)ͬ��ϵ�y(t��ng)�ڹ��I(y��)���a(ch��n)��܊�¼����յ��ИI(y��)�����V韵đ�(y��ng)���I(l��ng)���ԏ�1980��koren���������Ͽ����ԁ�(l��i)���T��ƌW(xu��)�����߇��@����S�f(xi��)�{(di��o)����չ�_���M(j��n)һ�����о����e��20���o(j��)90�����guo�Ȱ��p������Փ��(y��ng)�õ���늙C(j��)�Ŀ����ϣ�1992��tomizuka���ְ����m��(y��ng)ǰ�����Ʋ��ԑ�(y��ng)�õ�������Ͽ������У������˲��(w��n)푑�(y��ng)�Ϳ��ɔ_����[1]��1999���n��(gu��)�נ���W(xu��)��seok��seung��h0�ȸ���(j��)��(sh��)�Hƽ���D(zhu��n)���ٶȺͅ��������O(sh��)Ӌ(j��)ǰ���a(b��)��������(sh��)�F(xi��n)�������[2]��2000��?y��ng)|����W(xu��)�����A���ÂΌ�(du��)�ǻ������O(sh��)Ӌ(j��)������Ͽ�������ʹ�a(b��)�����ϵ�y(t��ng)���Ќ�(du��)��ռ��(y��u)�����ԣ���(sh��)�F(xi��n)���͏����������[3]��2002��?y��ng)|�ϴ�W(xu��)�����Б�(y��ng)����(j��ng)�W(w��ng)�j(lu��)�Ħ��A��ϵ�y(t��ng)�ķ�����(sh��)�F(xi��n)���ٶȺ͏�������ȫ�������[4]�����Ͽ��Ʒ��������هϵ�y(t��ng)���_�Ĕ�(sh��)�W(xu��)ģ�ͣ�������늙C(j��)�Ǹ��A����(qi��ng)��ϡ��Ǿ��ԕr(sh��)׃�ď�(f��)�s���ƌ�(du��)���^�y�@�����ľ��_��(sh��)�W(xu��)ģ�ͣ��@ʹ���y(t��ng)�ľ��Զ�����(sh��)hd�����{(di��o)��(ji��)�y���_(d��)������Ҫ��ͬ�r(sh��)���I(y��)���a(ch��n)��Ҫ��(sh��)�F(xi��n)�ٶȺ͏����Ľ�����ƣ��������˿����y�ȡ�
����ᘌ�(du��)�����ۙ��spwm׃�l����늵Ķ�늙C(j��)ͬ��ϵ�y(t��ng)�������˃��_(t��i)늙C(j��)ͬ������ϵ�y(t��ng)�Ĕ�(sh��)�W(xu��)ģ�͡�����rbf��(j��ng)�W(w��ng)�j(lu��)�����İ��m��(y��ng)pid���������Y(ji��)�����m��(y��ng)��(j��ng)Ԫ�����a(b��)��?sh��)Ľ�����Ƽ��g(sh��)���O(sh��)Ӌ(j��)����(j��ng)�W(w��ng)�j(lu��)����������(sh��)�F(xi��n)�˃�늙C(j��)ͬ��ϵ�y(t��ng)�ٶȺ͏����Ľ�����ơ�ԓ�������Y(ji��)��(g��u)��(ji��n)�Σ������ԌW(xu��)��(x��)���m��(y��ng)���������܉��m��(y��ng)�h(hu��n)����׃����
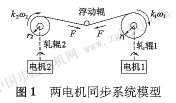
1��늙C(j��)ͬ��ϵ�y(t��ng)����ģ��
��늙C(j��)ͬ��ϵ�y(t��ng)ģ����D1��ʾ��һ�_(t��i)늙C(j��)������늙C(j��)����һ�_(t��i)��Ą�(d��ng)늙C(j��)�����_(t��i)늙C(j��)�Sͨ�^(gu��)�p�ٙC(j��)�c܈�����B��܈����(w��n)���B��Ƥ������(j��ng)Ƥ������ĸ�
��(d��ng)݁�oƤ��ʩ�ӏ���������(j��)�o������늙C(j��)���ٶȼ��o��Ƥ���ď������{(di��o)��(ji��)�Ą�(d��ng)늙C(j��)���ٶȣ��ԝM��ϵ�y(t��ng)�ٶȺ͏����Ŀ���Ҫ��(sh��)�F(xi��n)��(du��)ϵ�y(t��ng)��ͬ���f(xi��)�{(di��o)���ơ�����(j��)���˶��ɣ����]ǰ�����������������µ���ʽ[6],��:
ʽ��:k����fϵ��(sh��)��k=e/v;t�鏈��׃������(sh��)��t=l0/av��f��Ƥ��������r1��k1���l�_(t��i)Ƥ��݆(܈݁1)�İ돽���ٱȣ�r2��k2���2�_(t��i)Ƥ��݆(܈݁2)�İ돽���ٱȣ���r1,��r2�քe늙C(j��)l��늙C(j��)2��늽��ٶȣ�np1,np2�քe��늙C(j��)l��늙C(j��)2�ĘO��(du��)��(sh��)��a��Ƥ������e��e��Ƥ���ė��Ϗ���ģ����l����C(j��)���g�ľ��x��v�������ٶȡ�
�ď�����ʽ�п��Կ�����늙C(j��)���ٶ��c����֮�g����������P(gu��n)ϵ�������Ӱ푣��κ�һ��(g��)����׃������(hu��)������������׃������ˣ�Ҫ��(sh��)�F(xi��n)��(du��)���_(t��i)늙C(j��)��ͬ���f(xi��)�{(di��o)���ƣ��ͱ�회�(du��)ϵ�y(t��ng)�е��ٶȺ͏����M(j��n)�н��
2��늙C(j��)ͬ��ϵ�y(t��ng)�������O(sh��)Ӌ(j��)
2��1��늙C(j��)ͬ��ϵ�y(t��ng)��Ҏ(gu��)pid����
��늙C(j��)ͬ��ϵ�y(t��ng)��Ҏ(gu��)hd���ƿ�D��D2��ʾ���D�У��� 2������늙C(j��)���ٶȽo��ֵ���� r2  ������늙C(j��)���ٶȌ�(sh��)�Hֵ���ɹ�늾��a���z�y(c��)�õ���f����Ƥ�������Ľo��ֵ��f��Ƥ�������Č�(sh��)�Hֵ���ɏ����������z�y(c��)�õ������ڏ������|(zh��)�����Ƀ��_(t��i)늙C(j��)�g���ٶȲ�Q��[5]����˸���(j��)����늙C(j��)�ٶȽo���c����pid������ݔ���IJ��(l��i)�{(di��o)��(ji��)�Ą�(d��ng)늙C(j��)���ٶȣ��Ķ���(sh��)�F(xi��n)��(du��)Ƥ�������Ŀ��ơ�
����׃�l���c�Б�(y��ng)늙C(j��)ϵ�y(t��ng)��һ��(g��)��(f��)�s�ķǾ���ϵ�y(t��ng)��ͬ�r(sh��)Ƥ���Ą�(d��ng)���W(xu��)���ԏ�(f��)�s���� |