�����в�����늄әCϵ�y(t��ng)ƽ��ֵģ���о�
���Aɽ��ʷ���ƣ�����
���ϿƼ���W���������471003)
ժҪ�����ÏV�xƽ��ֵ�������˰����(q��)���·���в�����늄әCϵ�y(t��ng)ƽ��ֵ�M�ͣ�ͨ�^�r׃���������~ϵ��(sh��)��ӳϵ�y(t��ng)�ӑB(t��i)�ضǻ��ڙC��D(zhu��n)�Qԭ�����P�˱��ڿ��ƃ�(y��u)�����õ��C��׃�Q��ģ�ͣ��ѽ�������������׃�Ͷ��D(zhu��n)�ӽ��|ģ�K����ӳ������|���ķǾ������á�ģ�ͷ���Y(ji��)���c��(sh��)��(j��)�Č��ȱ�����ԓģ���^�õط�ӳ�в�����늄әCϵ�y(t��ng)�Ǿ�_���ӑB(t��i)���Ե���Ҫ���棻�����c˲�rֵӋ��ģ����ȣ�ģ�ͺ�����Ӌ��r���@���p�٣������ڌ��r���Ƒ��á�
�P(gu��n)�I�~������늄әCϵ�y(t��ng)����ģ��ƽ��ֵģ��
�ЈD���̖��tm383 �īI���R�a��a ���¾�̖��lilil4��7018(201 0)01һlill04��05
0�� ��
�в�����늄әC�����É���մɵ��扺�Ч��������D(zhu��n)���鶨���|(zh��)�c�ĸ��l��ӣ�Ȼ��ͨ�^�����D(zhu��n)��Ħ���������ʹ늙C���ӵęCе������D(zhu��n)�Q��늙C�D(zhu��n)�ӵ����D(zhu��n)���ܵ������(q��)���b�ã�����늄әC�Ĺ������ܲ��H�c��Y(ji��)��(g��u)�����ϡ�������ˇ���P(gu��n)�������c늙C���(q��)�ӺͿ���ϵ�y(t��ng)����Ҫ�P(gu��n)ϵ����ˌ�����늄әCģ�͵��о�����]Ӌ�c���ÿ����ṩ�ز����ٵ���S���A(ch��)��
����늄әC��ģ���о��֞����늙C�O(sh��)Ӌ�ĽY(ji��)��(g��u)ģ�ͺͻ���늙C�ŷ����Ƶ��(q��)�ӿ���ģ�ͣ����ǣ����ڳ���늄әC���Ə��s�Ҿ��и߶ȵķǾ��m��Ŀǰ�Пo��Ч�ĽY(ji��)��(g��u)ģ�́������乤���^�̣�늅���(sh��)�S�(q��)��ϵ�y(t��ng)׃�����Еr׃�ԣ���ˣ��郞(y��u)���m���(q��)��ϵ�y(t��ng)�����ܣ��õ����õĿ��Ʋ��ԣ����ďĄӿ��ƵĽǶȳ��l(f��)���������īI[2]�(q��)��ϵ�y(t��ng)ģ�����A(ch��)�ϣ���������늄әCϵ�y(t��ng)��ƽ��ֵ����ģ���������M�з�������c�����C���ó��m�Ͽ��ƵĿ��{(di��o)�l���{(di��o)�ࡢ�{(di��o)ռ�ձȵķ���ģ�ͣ�������늄әC���ŷ����þ�����Ҫ�Č��H���x��
l�в�����늄әC�(q��)��ϵ�y(t��ng)ģ��
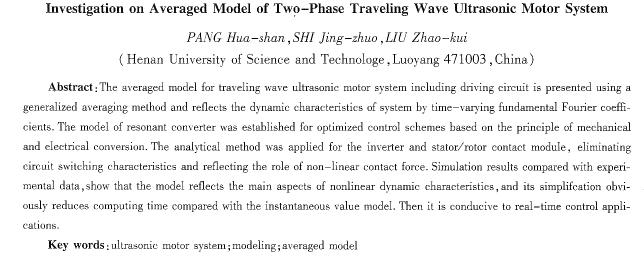
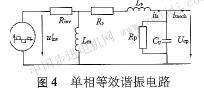
�ÙC늵�Ч׃�Q�ķ����õ�����늄әC�Ć����Ч�·����D1��ʾ��
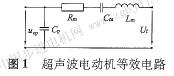
�W(w��ng)�У�����մɵ�Ч��ݣ�l1��c�����¡���ʾ��Ӷ��ӵ�Ч�����f����ʾ�Cе�(q��)�����ĵ�Ч늉���늙C���(q��)�ӿ��ƌ����ǘO���ĉ���մɣ��ϳɵ��в�Ҫ������(q��)��늉��l���c��ֵ��ͬ����λ��90������{(di��o)������늄әC��ӵļ��l(f��)��Ҫ������׃�·�(q��)�ӣ����ډ���մ��@ʾ���ԣ���õ����l�(q��)��늉��룬�pСϵ�y(t��ng)���������ж���Ҫ���(q��)���·�д�(li��n)늸У��@�r�(q��)���·��늙C�γ��C���·����늙CҲ���C���·��һ���֡����H�У��ڷ�����늙C�����l���£������C���(q��)���·��횴_���ʴ_�Ŀ��������ܫ@��****��늙C���ܡ���ˣ��x�Ã���ȫ���C����׃�(q��)���·��늙C�ṩ���l����늉�d1���·���ؓ�Y(ji��)��(g��u)��D2��ʾ��
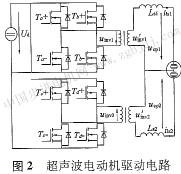
�·�������ƅ���(sh��)���_�P(gu��n)�l���ϣ�������ͨ�r�g�ۣ����НM����λ��p1=pһp=90���Ŀ����P(gu��n)ϵ�����ƃ�����ӵ���λ���Լ�������ͨռխ�ȱR-���R�����ƃ���늉���ֵ���_�P(gu��n)���IJ��μ�����(sh��)���x��D3��ʾ��
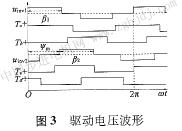
��mosfets���(q��)����̖�� ltinv2����׃ݔ��늉��������C��׃�Q��Ч�·ģ�͡�һ��D4��ʾ��
�D�У���׃����ϵ��(sh��)��r��������mos��fets��߅��Ч��裬�քe����׃�A���C���·��׃������߅��(c��)���ĵ�Ч����늸У��ڴ˻��A(ch��)e������׃�Q����늸�l(w��i)���c��(li��n)늸�l(w��i)��ֵ����^���ÿ���ģ�͕r�ɺ��ԴŻ����i�����Mһ�������������{(di��o)��늉�u��
ʽ�У�����Cе��Ӷ��ӵĵ�Ч��������o��׃�·���õ������C��׃�Q���ĺ�����B(t��i)���̣� 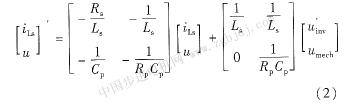 ������ӵ��P(gu��n)ϵ�əC����ϵ��(sh��)a��(li��n)ϵ�����]늙C������Q�������D(zhu��n)�ӽ��|���Ì�������ӵ�Ӱ푣���ģ�B(t��i)���� �c���l���_ϵ��(sh��)s1��s2����������늣��������ϵ�y(t��ng)����ʽ(1)�ó���ӳ��Ӷ��ӄӑB(t��i)���ԵĠ�B(t��i)���̣�
|