����ģ���W�j�ğoˢֱ��늄әC�{��ϵ�y
���������������u��
(��܊���̴�W���������710038)
ժҪ���oˢֱ��늄әC��һ�N��׃�����Ǿ��ݵĿ���ϵ�y�����ý����pid�����y�Եõ��M��Ŀ���Ч�����ڷ����oˢֱ��늄әC���Wģ�ͻ��A�ϣ������һ�N�Ѹ�˹�����������`�������OӋ�oˢֱ��늄әCģ���W�j���������·��������������ϵ�y푑��ٶȿ죬���ɔ_�������������^�ߵĿ��ƾ��Ⱥ��^�õ������ԣ�
�P�I�~����˹���������oˢֱ��늄әC��ģ���W�j���W���㷨
�ЈD���̖��tm33 �īI���R�a��a ���¾�̖��1004��7018(2010)01-0037��03
0����
��������S�������Ӽ��g����Ӽ��g��������Փ�����Ų��ϵĿ��ٰlչ���oˢֱ��늄әC(���º��Qbldcm)����Ѹ���ƏV�����y��bldcm�����D�ٿ���ϵ�y������pi���ƣ�ԓ�����㷨���Σ������{�����㣬��һ���Ŀ��ƾ���[1]�������|����һ�N���Կ��ƣ���Ҫ����ϵ�y���_�Ĕ��Wģ�ͣ���bldcm��һ����׃��������ϡ��Ǿ��ԡ��r׃�ď��sϵ�y����ϵ�yؓ�d���l��׃���r��pi���ƺ��y�_���A�ڵ��OӋЧ����
��bldcm�@߶ȷǾ���ϵ�y�У������W�j��ģ������[2]�ǘO��ǰ���ģ����������ϵ�y�����ԡ������Ժ������Եĝ�����ģ��������һ�N��ģ��߉���W�j��Y���γɵ�һ�N���ܿ��Ƽ��g���W�j���и߶Ȳ���̎�����ֲ��惦��Ϣ�ľW�j�Y�������к����ԌW�����ԽM������[3]���ڴˣ����W�j�ČW��������ģ������Ҏ�t�ı��_ӛ��������Y�ϣ��OӋ������ģ�������������@�N����������bldcm���D�ٿ���ϵ�y�����\��Ч������[4]��
���Č�ģ���W�j����bldcm���D�ٿ���ϵ�y�У��о���ģ���W�j�����еđ��á����o���˷���Y��.����Y������,ԓ���Ʒ����Ŀ���Ч�����@���ڳ�Ҏ��pid����.
1 bldcm���Wģ��
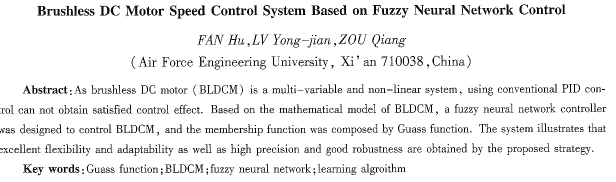
�Զ�����ͨ������������B����,�ɵ�bldcm�Ĕ��Wģ��[5],�����@�M��늉�ƽ�ⷽ��ʽ�ɱ�ʾ��:
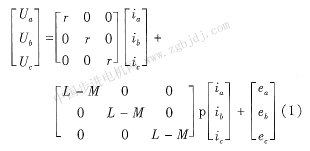
ʽ�У�ua,ub,uc�鶨�������@�M��늉���ia��ib��ic�鶨�������@�M�����;ea,eb,ec�鶨�������@�M���
ʽ��:tem��늴��D��;tl��ؓ�d�D��;b������ϵ��;�؞�늙C�Cе�D��;j��늙C�D�ӑT��.
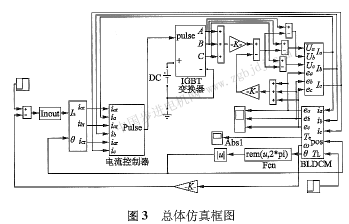
ԓģ�ͺ��Ό��ã��������Ŀ���ϵ�y�У���ԓģ�ͽ�����bldcm���鱻�،����M�п��ơ�
2ģ���W�j���������OӋ
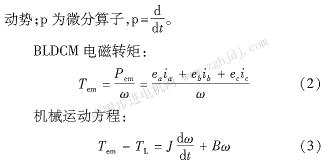
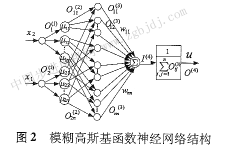
ϵ�y�Y����D1��ʾ.�؞�bldcm�����D��,�؞�bldcm���H�D��,x1,x2��u�քe��ģ�����ڻ������W�j��ݔ���ݔ��,��Փ���O��[0,1],�`��e���`��׃����en.ͨ�^xӳ���D�Q���W�j��ݔ��x1,x2,uӳ��������nj��W�jݔ��u�D�Q��bldcm�Ŀ������i(t).jn���`��Ŀ�˺���1/2(��-��)2,����jn���ھ��W���㷨���ھ��{��ģ���W�j�ę�ֵ,ʹϵ�y�����ԌW���Ĺ���.
2.2ģ�����ڻ������W�j�Y��
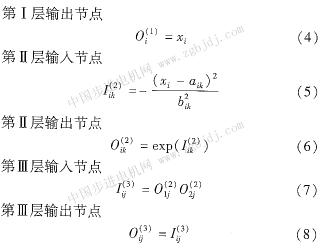
ģ����˹�������W�j�Y����D2��ʾ[6].�D2��,��i�ӌ�x1,x2����W�j;��ii�ӌ�x1,x2ģ
����,���õ��`�ٺ������˹����  (����a,b��׃��x�ĸ�˹������ֵ���ĺ͘˜�ƫ��); ��3�ӌ���ģ�������@����x�˷e��������ģ������;��5�ӌ���ȥģ��������.�W�j��ݔ��ݔ���Pϵ����:
�D�٭h����ģ���W�j�{����������h����������h��������늙C�o��ؓ�d�D��tl=5 n��m����늙C�\���ڸߵ�����r�·քe |